Categoria: Robotica e Domotica
Trovi in questa categoria tutti gli articoli e i progetti dedicati alla robotica e alla domotica con Arduino
Navigando in rete ho trovato un progetto davvero interessante: Allarme video Raspberry Pi ( titolo originale: How to make a DIY home alarm system with a raspberry pi and a webcam )
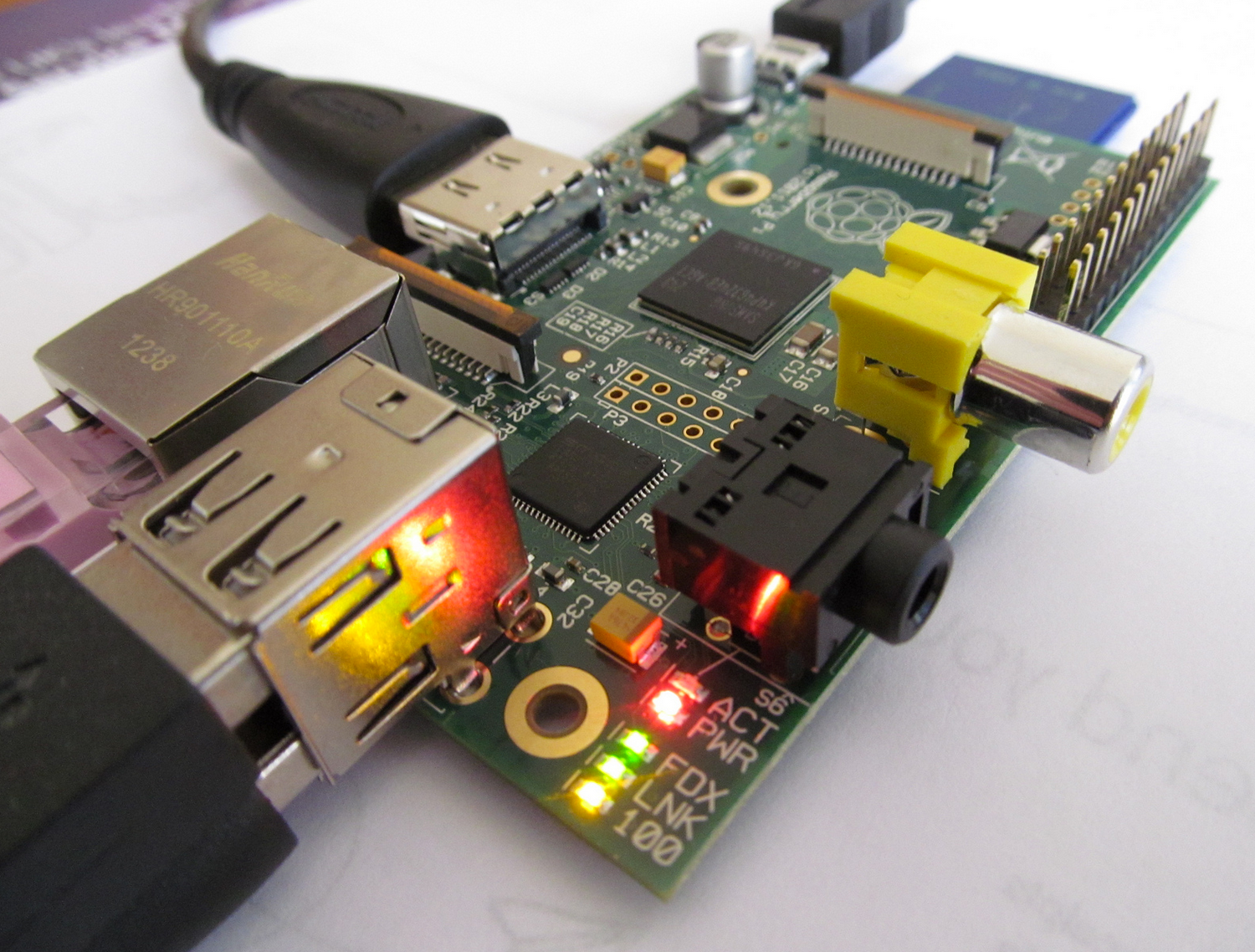
I progetti con Raspberry Pi nell’home automation, o come la chiamiamo in italiano: domotica, sono molto interessanti perchè puoi utilizzare la potenza di Linux e dell’open-source software per personalizzarti software complessi e combinarli tra loro per ottenere nuovi progetti personalizzati.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/allarme-video-raspberry-pi.html
Oggi ho provato la Bluetooth Low Energy Shield servo ossia la Bluetooth Low Energy Shield con tre servocomandi di quelli comunemente usati in modellismo.
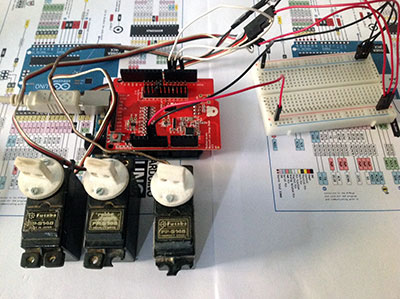
Il controllo dei servo, come sai, avviene mediante l’uso dei pin pwm di arduino e l’uso della classe Servo.h ed i servo standard sono in grado di eseguire movimenti in gradi da 0 a 180.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/bluetooth-low-energy-shield-servo.html
Il Bluetooth Low Energy Shield led è un esempio di utilizzo della Bleshield con 3 led controllati in PWM via Bluetooth dal tuo smartphone.
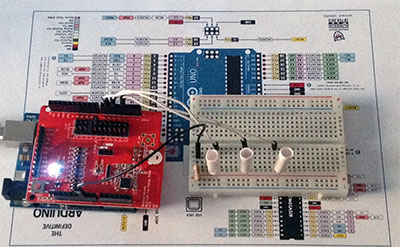
Usando l’App per smartphone di cui hai letto in questo articolo potrai anche controllare i led con la modalità pwm per ottenere luci regolabili in intensità dal tuo smartphone. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/bluetooth-low-energy-shield-led-pwm.html
La Bleshield: Bluetooth Low Energy Shield è una shield prodotta da redbearlab che ti permette di controllare fino a 6 pin digitali e 6 analogici con il bluetooth dal tuo smartphone.

E’ la prima volta che scrivo di un progetto bluetooth fatto da me, in passato ho pubblicato alcuni progetti fatti da appassionati, ma io in prima persona non ho mai provato questa tecnologia fino ad oggi.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/bluetooth-low-energy-shield-bleshield.html
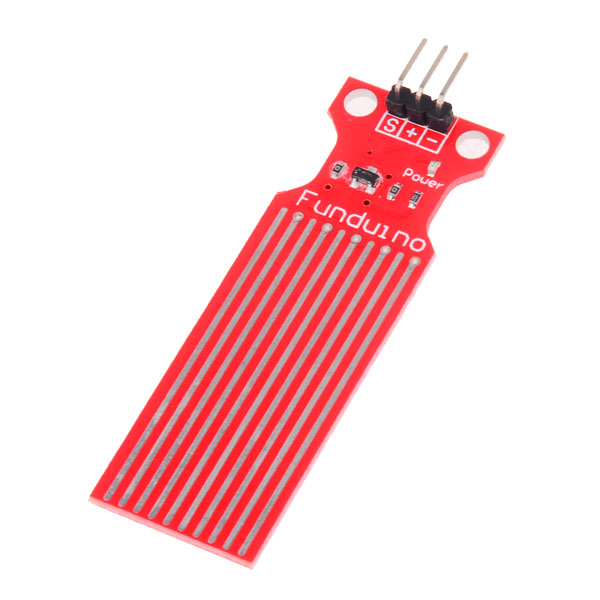
Ho acquistato e testato il funduino water sensor un sensore di livello per arduino con cui puoi monitorare il livello d’acqua presente in un serbatoio.
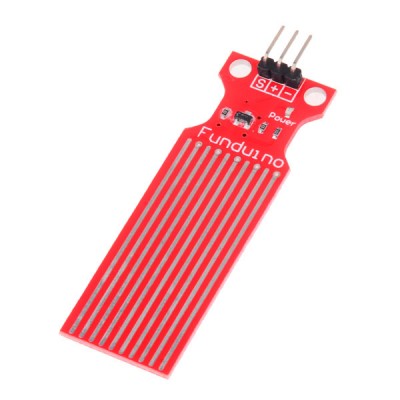
Il funduino water sensor è piccolo in modo che tu possa installarlo facilmente anche in contenitori di ridotte dimensioni.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/funduino-water-sensor-test.html
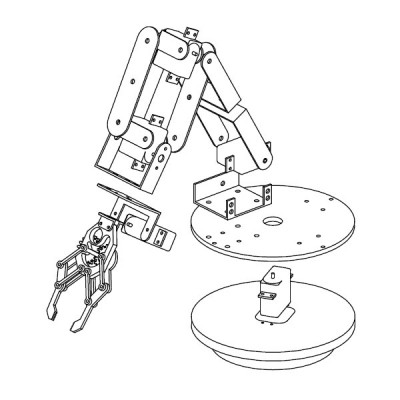
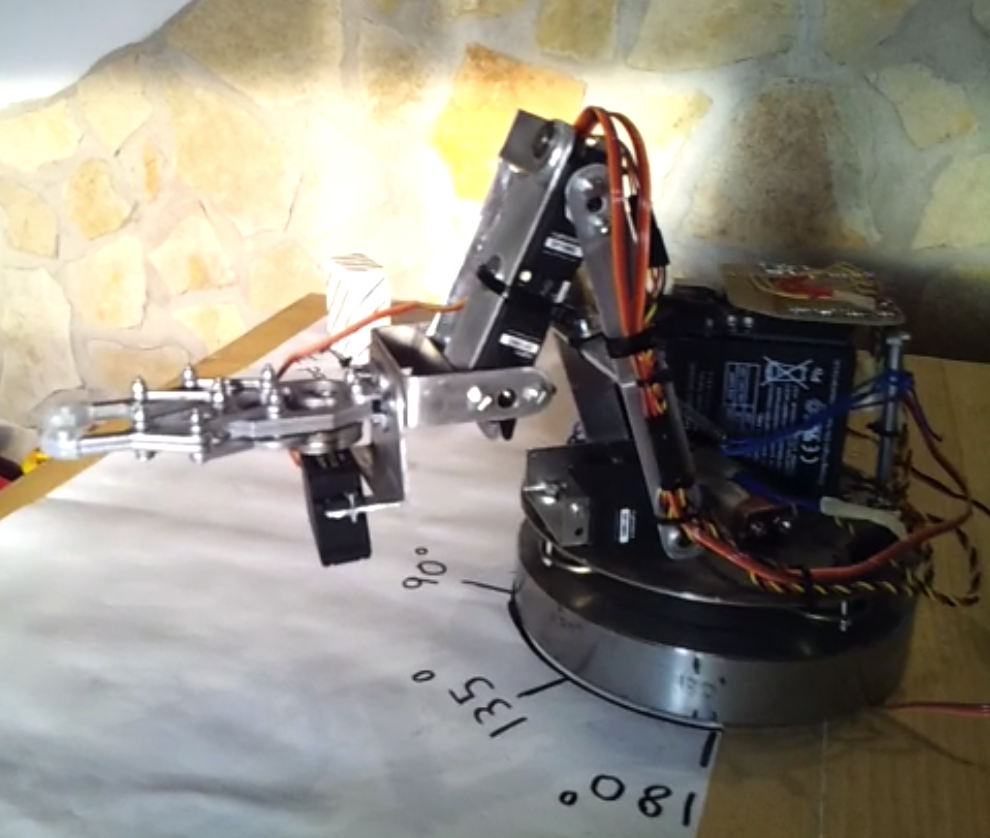
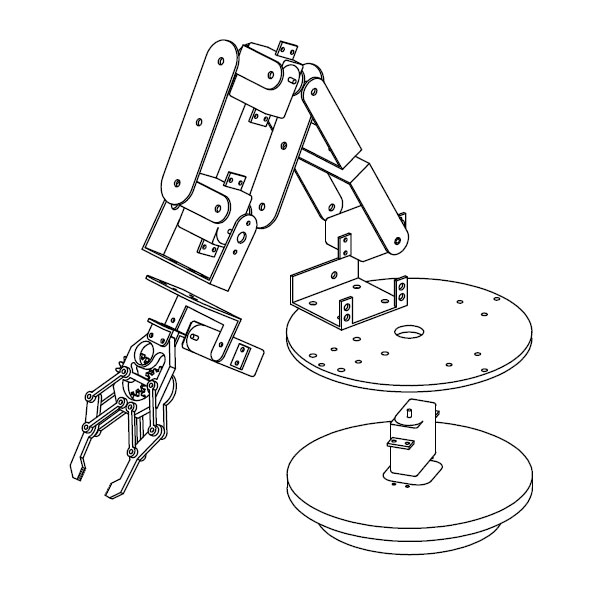
In questo ultimo articolo dedicato al braccio robot leggerai come realizzare la versione finale del progetto di Enrico.
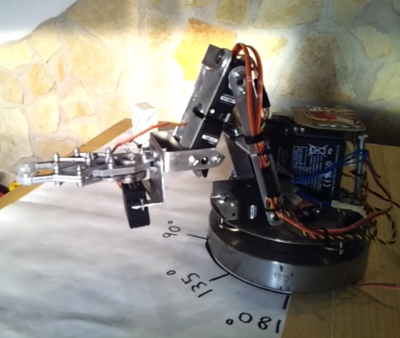
Ho voluto dedicare spazio alla fase progettuale del braccio robot per chiarire che un progetto come questo non lo si realizza in pochi giorni, occorre una accurata fase progettuale e dei test di funzionamento che a volte possono risultare anche molto simili al risultato finale ma che solo attraverso i quali puoi avere un’idea precisa della fattibilità del tuo progetto.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/braccio-robot-sketch-finale-quarta-parte.html
Le stampanti 3D sono sempre più diffuse nel mondo dei makers tuttavia non smettono mai di stupirmi come il progetto: 3D Printing Brushless DC Motor
in cui Patrick Eells ha realizzato un video sulla realizzazione di un motore brushless interamente stampato con una stampate 3D Makerbot in fasi successive.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/3d-printing-brushless-dc-motor.html
In questo articolo leggerai la terza parte della realizzazione di Enrico sul braccio robot calibrazione dei servo che hanno il compito di muovere le articolazioni del braccio.
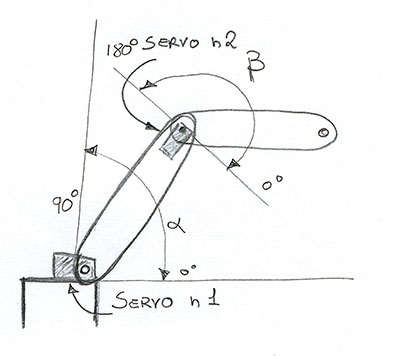
Enrico ha voluto condividere questo articolo con tutti gli appassionati arduino partendo dall’inizio: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/braccio-robot-calibrazione-terza-parte.html
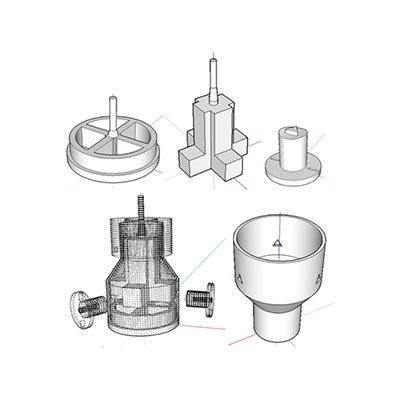
Enrico dopo aver verificato per il suo prototipo di braccio robot il corretto funzionamento ( puoi vedere il risultato in questo articolo ) è passato alla realizzazione dei disegni tecnici.
In questa seconda parte potrai trovare i disegni delle parti metalliche realizzati da Enrico e lo schema dei collegamenti tra arduino ed i servo, in un prossimo articolo pubblicherò lo sketch di taratura dei servo per arrivare alla pubblicazione dello sketch finale e del video dimostrativo presentato all’esame di maturità da Enrico. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/braccio-robot-seconda-parte.html
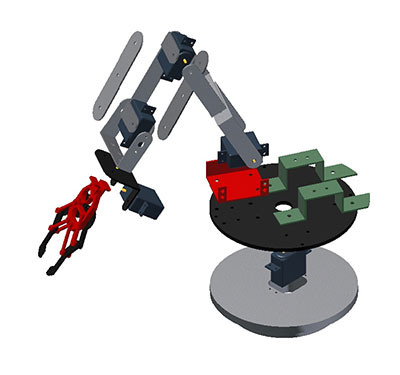
Ultimamente hai notato che ho dato molto spazio a giovani maturandi che come Franceschetti Enrico hanno da pochi giorni sostenuto gli esami di maturità con progetti come il braccio robot o la mano robot di Gabriele.
Sia Gabriele sia Enrico hanno superato l’esame con ottimi voti, almeno mi hanno riferito così, ed io gli credo perché entrambi i progetti li troverai davvero eccellenti.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/braccio-robot-di-franceschetti-enrico.html
Rientrato dalla pausa estivami ricollego subito all’ultimo articolo pubblicato parlando di Arduino nunchuck.
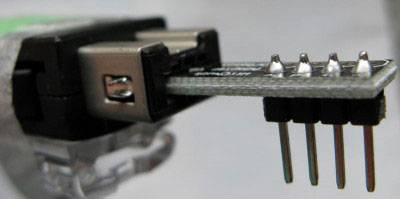
Sai che sono contro le cose non originali perché credo nel diritto d’autore e sul sostegno delle aziende che investono in ricerca e sviluppo per fornirci prodotti sempre nuovi e innovativi, se non sosteniamo le aziende originali queste a lungo andare chiuderanno o non svilupperanno più nulla di innovativo per il tuo diletto.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/arduino-nunchuck-non-originale.html
Il venerdì spesso trovi articoli dedicati a progetti realizzati da appassionati come Michele che ha realizzato il “beginner kit nunchuck” unendo le sue conoscenze sul beginner kit ed il nunchuck.
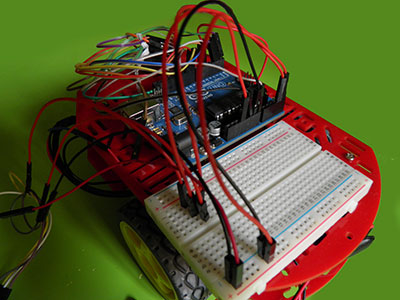
Michele è un appassionato arduino e dopo aver frequentato i miei corsi arduino in aula è impegnato a sperimentare nuovi sketch con la passione per la condivisione delle scoperte e delle conoscenze acquisite.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/beginner-kit-nunchuck-di-michele.html
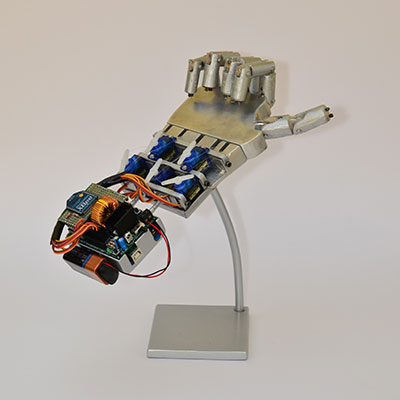
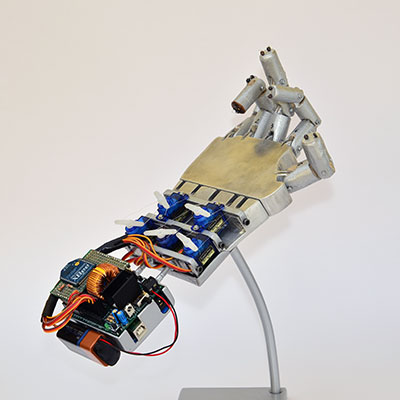
Siamo giunti all’ultimo articolo dedicato alla robot hand xbee mano di Gabriele, progetto davvero benfatto e molto ben documentato per l’esame di maturità che Gabriele sta sostenendo in questi giorni.
Nei precedenti articoli hai letto: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/robot-hand-xbee-mano-di-gabriele-santin.html
Se stai leggendo il blog da qualche giorno hai letto della robot hand xbee guanto di Gabriele Santin negli articoli dedicato a questo interessante progetto.
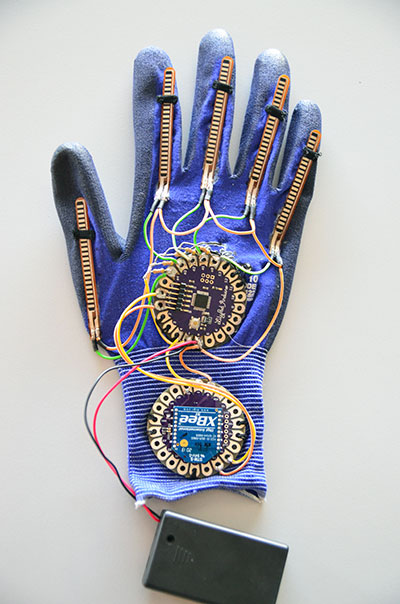
Gabriele ha voluto condividere lo sketch della realizzazione del guanto e della trasmissione xbee dal guanto alla mano ( attuatore ) in quella che in un noto film ( Real Steel ) viene definita modalità ombra ossia la possibilità di far ripetere ad un robot i movimenti di un essere umano in tempo reale.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/robot-hand-xbee-guanto-di-gabriele-santin.html
Analizziamo insieme a Gabriele l’elettronica del suo progetto: Robot hand XBee elettronica.
Puoi leggere la prima parte del progetto con le motivazioni ed il principio di funzionamento in questo articolo.
Robot hand XBee elettronica
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/robot-hand-xbee-elettronica-di-gabriele-santin.html
Recupero 15 di 294 elementi rimasti...


 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza