Nel precedente articolo dedicato alla motor shield FE fornita da robot-domestici.it hai imparato a pilotare un motore bipolare con la motor shield, probabilmente i tuoi progetti non sono quelli di farlo ruotare all’infinito ma di controllare la posizione, i giri e i passi che il tuo motore compie.
In questo articolo vedrai come impostare un numero di passi che vuoi far compiere al motore bipolare ed eseguirli. Continua a leggere
Ti sarai chiesto come poter alimentare Arduino e le shield che compongono il tuo progetto, con una corrente sufficente.
La soluzione arriva dalla sparkfun con il DC-DC Converter Breakout.
La porta USB del computer è limitata a 500mA, che è più che sufficente per i primi esperimenti, ma risulta insufficente se vuoi alimentare più shield connessi ad arduino e, sopratutto, quando il tuo progetto sarà finito vorrai alimentarlo senza il computer.
Navigando in rete mi sono imbattuto nel canale di Sylvia, l’entusiasmo con cui questa bambina ha realizzato i suoi video e continua a produrne è impressionante.
Ha due genitori che incoraggiano questa sua passione, il padre, ad esempio, monta i video ma la vitalità e la felicità sono tutti di Sylvia.
Continua la serie di articoli su come utilizzare la “Motor Shield Fe” ed Arduino iniziata qualche settimana fa con il primo articolo: Tutorial: Motor Shield FE – prima parte.
In queste settimane hai sperimentato come costruirla, testarla e pilotare due motori in CC ( Corrente Continua) ma la motor shield FE può essere utilizzata che per pilotare un motore passo-passo, unipolare o bipolare, e quindi la puoi usare per la tua CNC o stampante 3D autocostruita.
Danilo, un appassionato arduino come te, mi ha scritto in questi giorni per sottopormi il suo progetto ed ha trovato numerosi spunti nel blog per realizzarlo. Ad un tratto mi ha scritto: “… Vorrei aggiungerci appunto un interuttore,per i led ...”
Puoi leggere la nostra conversazione come commento all’articolo Tutotorial Arduino e i servo II in cui Danilo ha postato il suo sketch.
Scopri come collegare la Motor Shield ad Arduino, e far muovere due motori in corrente continua con un semplice sketch.
Un video dice più di mille parole, puoi seguirlo per collegare prima l’alimentazione, poi i due motori ed infine l’Arduino al computer. Continua a leggere
Collega il tuo nunchuck ad arduino attraverso l’adattatore della dfrobot e una breadboard, e proviamo uno sketch semplice per verificare di aver collegato tutto in modo corretto.
Prima di tutto collega l’adattatore alla porta del nunchuck, per farlo osserva la posizione dei pin sul connettore del nunchuck, come illustrato nel precedente articolo:
Dopo aver assemblato la Motor Shield FE, è l’ora di iniziare ad utilizzarla e per farlo è necessario che ti sia chiaro a cosa servono i jumper su di essa e come utilizzarli per evitare sia di danneggiare la scheda, ma sopratutto di danneggiare il computer o Arduino.
Oggi puoi leggere il primo articolo su Nunchuck, Arduino, Servo. Una delle caratteristiche che ha reso famodo Arduino è stata quella di poter facilmente pilotare dei servo per uso modellistico.
E’ infatti possibile pilotare di base fino a 6 servomotori con un arduino uno, duemilanove, mini e similari, ossia quelli basati su Atmega 168 e 328; il numero di porte PWM cresce su arduino mega e similari il cui chip è un atmega 2560.
Venerdì 17 porta sfiga ? Io dico di no, venerdì scorso il 17 febbraio 2012 ha portato futuro, innovazione e collaborazione.
Se leggi questo blog da qualche tempo sai quanto Arduino sia parte importante dei miei esperimenti, ma sopratutto sai che, come a te, mi piace la condivisione delle idee.
Qualche giorno fa mi sono arrivate alcune shield Arduino. Tra questi la Motor Shield FE una cheda con cui puoi pilotare sia motori in corrente continua sia motori passo-passo.
In questo articolo potrai legger passo passo come assemblarla, l’unico componente per il quale devi avere una maggiore attenzione è l’integrato L298, in quanto smd.
Il 30 novembre 2010 è stato rilasciato il nuovo IDE 1.0 per programmare Arduino. Da allora sono passati alcuni mesi e forse lo hai già provato sul tuo computer.
E’ possibile che tu sia riuscito già a installarlo su Windows 7, in tal caso questa guida non ti serve, ma se non ci fossi riuscito o volessi controllare di averlo installato correttamente sei nel posto giusto.
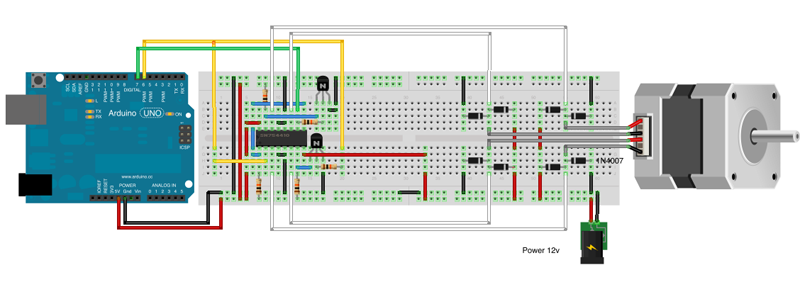
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:















 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza