Marlin Kimbra MK4duo config è un articolo in cui ti mostro sia come ho configurato la mia stampante Delta Kossel 250 3D con questo meraviglioso firmware sia il configuratore del firmware per stampanti 3D. Mi …
In questi giorni ho ripreso un vecchio post del blog: Tutorial Arduino – IR con TSOP31238 e mi sono chiesto se fosse possibile da un altro Arduino inviare dei segnali IR al primo, magari con …
Nel precedente articolo ti ho mostrato le modifiche da apportare allo sketch originale per poter inserire nuovi giochi di luce. Il secondo gioco di luce accende le serie in sequenza partendo dagli estremi fino al …
FireBeetle ESP32 NTP client apre la strada ad una serie di progetti in cui hai la necessità di conoscere l’ora aggiornata. Come sai la ESP32, sia in versione standalone sia in versione firebeetle non è …
Per progettare con la breadboard trovo davvero utili un 3.3V-5V power supply module che quanche mese fa mi ha mostrato un appassionato arduino. Ho cercato a lungo il prodotto fino a trovarlo da robotics-3d e nell’ultimo …
La procedure OrangePi install Debian ti guida passo passo nell’installazione di linux sulla scheda OrangePi: Probabilmente ricordi l’unboxing della OrangePi dello scorso marzo.
Riprendendo un precedente articolo su Arduino e le strighe oggi ti racconto di un test che ho eseguito nei giorni scorsi e che mi ha risolto molti problemi proprio nelle conversioni da char a string …
Il LoRa Node pcb che ho realizzato con Marco Brianza è pronto per essere utilizzato nei tuoi progetti IoT grazie alle librerie ed i test eseguiti in questi mesi. dal primo articolo sono passate alcune …
Tinkercad interrupt pir unisce un sensore pir ad un arduino per mostrarti come funziona un interrupt e come funziona sull’arduino uno. La serie di articoli a cui questo tutoril si unisce è quella dedicata alle …
FireBeetle NTP Clock Touch riprende un precedente progetto realizzato con l’ESP32 per aggiungere la funzionalità Touch. Qualche settimana fa leggendo le caratteristiche della ESP32 ho scoperto che dispone di 10 pin di tipo Touch a …
Oggi puoi leggere il primo articolo su Nunchuck, Arduino, Servo. Una delle caratteristiche che ha reso famodo Arduino è stata quella di poter facilmente pilotare dei servo per uso modellistico.
E’ infatti possibile pilotare di base fino a 6 servomotori con un arduino uno, duemilanove, mini e similari, ossia quelli basati su Atmega 168 e 328; il numero di porte PWM cresce su arduino mega e similari il cui chip è un atmega 2560.
Venerdì 17 porta sfiga ? Io dico di no, venerdì scorso il 17 febbraio 2012 ha portato futuro, innovazione e collaborazione.
Se leggi questo blog da qualche tempo sai quanto Arduino sia parte importante dei miei esperimenti, ma sopratutto sai che, come a te, mi piace la condivisione delle idee.
Qualche giorno fa mi sono arrivate alcune shield Arduino. Tra questi la Motor Shield FE una cheda con cui puoi pilotare sia motori in corrente continua sia motori passo-passo.
In questo articolo potrai legger passo passo come assemblarla, l’unico componente per il quale devi avere una maggiore attenzione è l’integrato L298, in quanto smd.
Il 30 novembre 2010 è stato rilasciato il nuovo IDE 1.0 per programmare Arduino. Da allora sono passati alcuni mesi e forse lo hai già provato sul tuo computer.
E’ possibile che tu sia riuscito già a installarlo su Windows 7, in tal caso questa guida non ti serve, ma se non ci fossi riuscito o volessi controllare di averlo installato correttamente sei nel posto giusto.
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
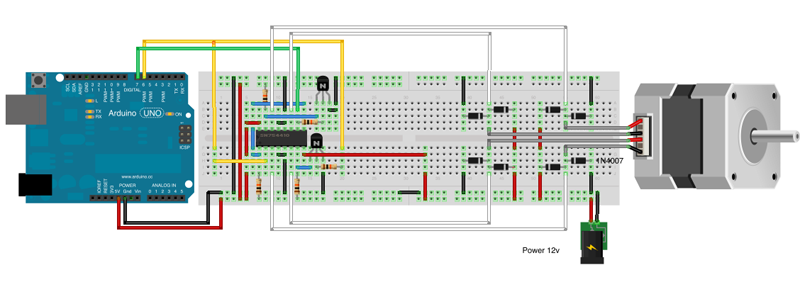
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Creare il tuo repository yum ha dei vantaggi oggettivi sopratutto se devi installare e aggiornare molti server linux e vuoi essere certo che anche a mesi di distanza l’aggiornamento avvenga con gli stessi pacchetti.
Il problema che più spesso incontro con l’attività di installazione di molti server, sul medesimo hardware è che tra una installazione e la successiva le versioni dei pacchetti di upgrade sono differenti, questo causa un disallineamento tra una installazione e la successiva.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:
Si, è proprio quello che penso, collaborare è un ottimo modo per aiutare noi stessi e gli altri. Quando ho deciso di aprire questo blog l’ho fatto con il chiaro intento di pubblicare degli articoli su alcune mie passioni e condividere le mie conoscenze con altri.
Dal primo articolo pubblicato sono passati 10 mesi e sono nate numerose collaborazioni, tantissimi contributi e richieste, a cui ho cercato di dare risposta con la passione, cercando di non deludere nessuno.
Il titolo è volutamente provocatorio, se ti sono piaciuti i miei articoli sui motori passo-passo sarai ancora più interessato a quello che stai per leggere.
Ringrazio da subito il Sig. Franco Da Re, che qualche giorno fa mi ha scritto dopo aver letto questo articolo:
Il tuo esperimento con i motori passo-passo bipolari inizia a diventare interessante, se hai seguito i precedenti articoli avrai realizzato il tuo controllo motore passo-passo bipolare con Arduino e un SN754410NE.
Nella quarta parte hai affrontato il problema della velocità di rotazione ed una prima soluzione per risolvere l’inconveniente dovuto ad una eccessiva velocità di successione dei segnali alle bobine che hanno come effetto collaterale la completa immobilità del motore e l’emissione di un sibilo.
In questi giorni ho fatto numerosi esperimenti con i motori passo-passo bipolari per porter scrivere nuovi articoli e sto preparando una sorpresa che, spero, troverai interessante.
In questo articolo prendo spunto dal commento alla terza parte di questa serie di articoli da parte di un appassionato come te e me. Il problema di cui mi ha reso partecipe è che collegando il motore e caricato lo sketch esso emette un sibilo e non si muove.
Tra i progetti presenti sul web è senza dubbio uno di più interesanti a mio avviso. Molti utenti leggendo i miei articoli sui motori passo passo hanno scritto chiedendomi come realizzare un Dolly Project.
Navigando in rete c’è tantissimo materiale a riguardo e da ignorante in materia mi sono documentato per capire di cosa si trattasse e cosa fosse un Dolly Project.
Applica le tue conoscenze al tuo progetto! Se hai letto la prima e la seconda parte di questa serie di articoli avrai certamente raggiunto il livello di conoscenza adeguata alla realizzazione del tuo progetto.
Con due semplici pulsanti puoi far ruotare il motore in senso orario o antiorario fino al raggiungimento del punto desiderato, questo movimento applicato ad esempio ad un ingranaggio che traduce il movimento rotatorio in movimento lineare, ad esempio mediante delle viti trapezie in una cnc, ti consente di posizionare l’utensile della CNC nel punto desiderato.
Continuando a lavorare con i motori passo-passo e Arduino hai visto lo sketch che ti permette di testare il collegamento dei due pulsanti facendo lampeggiare il led connesso al pin 13.
Se non sai come collegare i due pulsanti ad Arduino puoi leggere la prima parte di questa serie di articoli.
Riporto lo sketch illustrato per consentirti di approfondire le sue funzionalità prima di passare a mostrarti il video di quello che esegue: Continua a leggere
Pilota un motore passo-passo con due interruttori. Nei precedenti articoli hai imparato a collegare e regolare la velocità di un motore passo-passo bipolare con Arduino.
Oggi ti spingerai un po’ oltre iniziando a collegare dei pulsanti ad Arduino e utilizzandoli per posizionare l’albero del motore dove lo riterrai più opportuno.














 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza