Ti ha incuriosito il mio articolo dedicato all’Adaptive gripper 3D printed ? Ha generato in te la curiosità ed il desiderio di realizzartene uno?
Accontentato !!! Oggi ti mostrerò come puoi realizzarti il tuo adaptive gripper 3D printed con l’uso di una stampante 3D e la forza della condivisione.
I miei progetti sono sempre in divenire quindi parlare di “conclusione” del Dolly Photo non è del tutto corretta diciamo più che si tratta di un punto fermo nello sviluppo del progetto.
Con le informazioni raccolte fino a questo punto puoi già realizzare il tuo Dolly Photo funzionante.
Il driver della Pololu a4983 è un driver per motori passo-passo semplice da utilizzare e molto preciso, l’integrato a4983 è utilizzato anche per la realizzazione di altri driver non prodotti dalla pololu ed il suo funzionamento non differisce da questo articolo.
Ho trovato in internet due versioni di questo driver entrambe prodotte dalla Pololu una con regolatore di tensione ed una senza il regolatore di tensione entrambe le versioni sono state sostituite da una scheda identica basata dul regolatore a4988.
Tuttavia questo tipo di motore, tanto utile in robotica, suscita sempre tanta curiosità e spesso le sole parole scritte negli articoli non sono sufficenti.
Continua la serie di articoli su come utilizzare la “Motor Shield Fe” ed Arduino iniziata qualche settimana fa con il primo articolo: Tutorial: Motor Shield FE – prima parte.
In queste settimane hai sperimentato come costruirla, testarla e pilotare due motori in CC ( Corrente Continua) ma la motor shield FE può essere utilizzata che per pilotare un motore passo-passo, unipolare o bipolare, e quindi la puoi usare per la tua CNC o stampante 3D autocostruita.
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
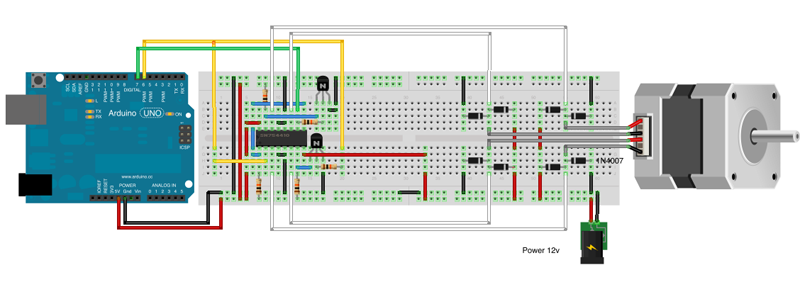
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:
Il titolo è volutamente provocatorio, se ti sono piaciuti i miei articoli sui motori passo-passo sarai ancora più interessato a quello che stai per leggere.
Ringrazio da subito il Sig. Franco Da Re, che qualche giorno fa mi ha scritto dopo aver letto questo articolo:
Il tuo esperimento con i motori passo-passo bipolari inizia a diventare interessante, se hai seguito i precedenti articoli avrai realizzato il tuo controllo motore passo-passo bipolare con Arduino e un SN754410NE.
Nella quarta parte hai affrontato il problema della velocità di rotazione ed una prima soluzione per risolvere l’inconveniente dovuto ad una eccessiva velocità di successione dei segnali alle bobine che hanno come effetto collaterale la completa immobilità del motore e l’emissione di un sibilo.
Applica le tue conoscenze al tuo progetto! Se hai letto la prima e la seconda parte di questa serie di articoli avrai certamente raggiunto il livello di conoscenza adeguata alla realizzazione del tuo progetto.
Con due semplici pulsanti puoi far ruotare il motore in senso orario o antiorario fino al raggiungimento del punto desiderato, questo movimento applicato ad esempio ad un ingranaggio che traduce il movimento rotatorio in movimento lineare, ad esempio mediante delle viti trapezie in una cnc, ti consente di posizionare l’utensile della CNC nel punto desiderato.
Pilota un motore passo-passo con due interruttori. Nei precedenti articoli hai imparato a collegare e regolare la velocità di un motore passo-passo bipolare con Arduino.
Oggi ti spingerai un po’ oltre iniziando a collegare dei pulsanti ad Arduino e utilizzandoli per posizionare l’albero del motore dove lo riterrai più opportuno.
Oggi ho fatto qualche esperimento con il mio motore bipolare, Arduino e l’SN754410NE, nel precedente articolo: Motori passo-passo bipolari con Arduino – seconda parte hai imparato a pilotare un motore bipolare con Arduino, oggi imparerai come regolarne la velocità.
Nello schema in alto ho rappresentato il collegamento tra Continua a leggere













 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza