Tag: servo
La mano biomeccanica e altre realizzazioni di mano hanno necessità di un servo e sensore di flessione per risprodurre il movimento delle tue dita sulla mano robotica.
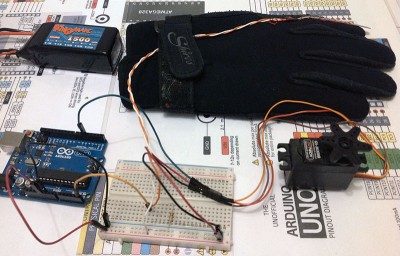
L’uso del sensore di flessione e come collegarlo ad arduino per leggerne i valori li hai già letti negli articoli: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-e-sensore-di-flessione.html
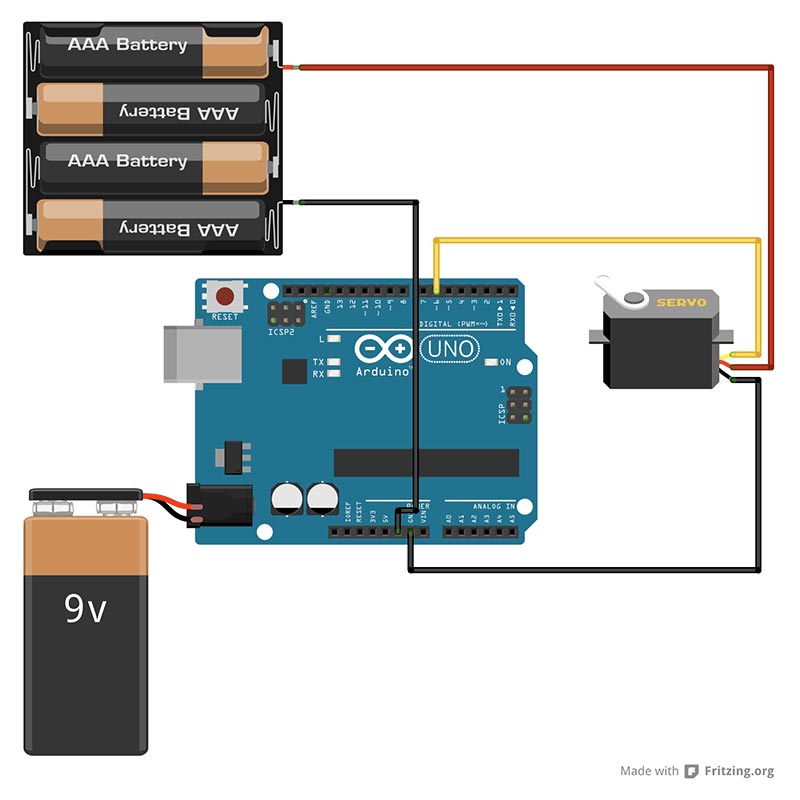
L’alimentazione erogata da arduino spesso non è sufficiente per consentirti di alimentare uno o più servocomandi e devi ricorrere ad arduino servo con alimentazione esterna.
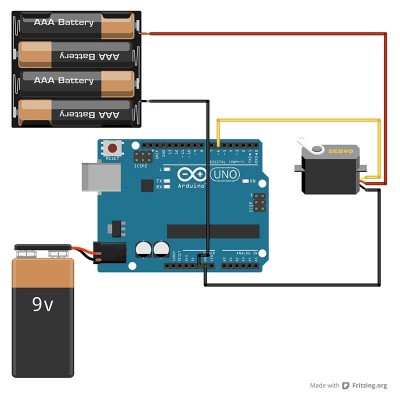
Ossia devi utilizzare una alimentazione per arduino ed una separata per il o i servocomandi.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/tutorial-arduino-servo-con-alimentazione-esterna.html
Gabriele è un appassionato arduino, e non solo, che ha realizzato uno progetto “Gestione Servo potenziometro e switch”.

L’evoluzione di questo primo esperimento sarà una Testa Mobile simile a quella utilizzata nelle discoteche.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-potenziometro-e-switch-di-gabriele.html
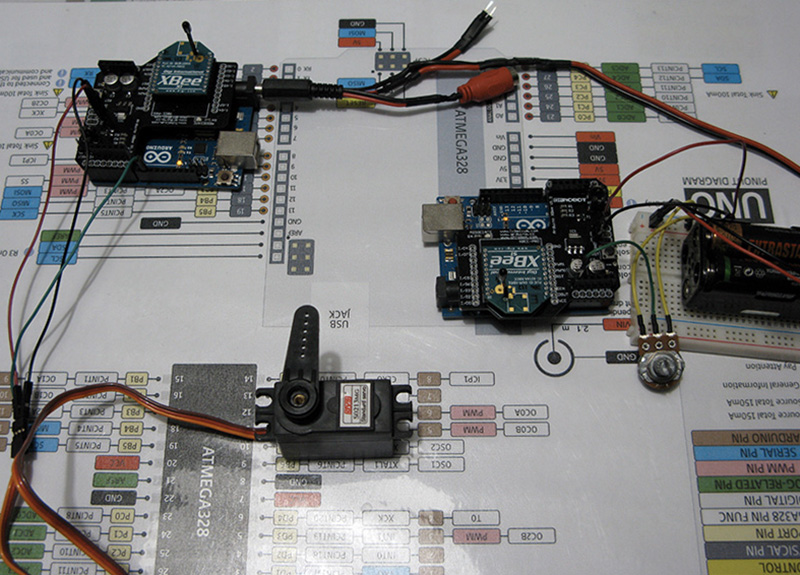
L’Xbee servo è un progetto che puoi riprodurre facilmente se hai letto i miei ultimi esperimenti con gli XBee ed i segnali PWM.
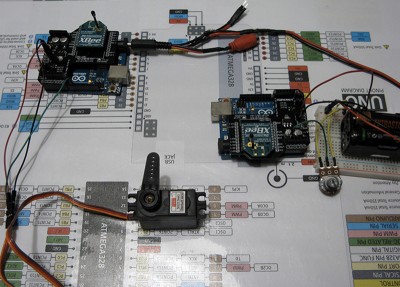
Sicuramente accendere uno o più led in dissolvenza da remoto è utile se stai realizzando la tua centralina domotica di controllo luci, tuttavia i miei esperimenti sono anche orientati alla robotica ed un robot fa uso dei servo per attuare i movimenti.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/xbee-servo.html
Negli ultimi giorni il progetto mano biomeccanica ci ha regalato nuove soddisfazioni mostrandoci i movimenti delle altre sita della mano:

Federico che ha progettato la struttura è impegnato nell’esperienza di montaggio e rifinitura del progetto.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/continua-progetto-mano-biomeccanica.html
Finalmente siamo riusciti ad ottenere il primo movimento della mano bio meccanica, saprai che il progetto a cui sto collaborando è nato dall’idea di Federico che ha anche realizzato un sito su cui pubblichiamo le evoluzioni ed i progressi.

Il montaggio della mano si è rivelato più impegnativo del previsto, sia per la complessità dell’articolazione umana a cui ci siamo ispirati sia per la difficoltà di montaggio dovuta a spazi limitati e meccaniche molto vicine. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/primo-movimento-della-mano.html
L’articolo di oggi voglio dedicarlo a Matteo Trenti un artista che ha realizzato una giacca animata per il suo spettacolo “Cuore elettrico”

Ho incontrato Matteo nel corso della scorsa edizione di Robotica 2012 e scambiato con lui alcuni consigli di robotica sulla realizzazione di una giacca robotica, questo l’input che Matteo mi aveva suggerito.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/giacca-animata-matteo-trenti.html
Spesso mi scrivono appassionati che mi chiedono un consiglio sulla scelta del motore in corrente continua, passo passo o servo:

noto sempre una certa confusione e voglio provare a descrivere meglio le caratteristiche di ciascun tipo di motore ed il loro utilizzo.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/motore-corrente-continua.html
Gli esperimenti dedicati alla mano bio meccanica mi hanno portato a ragionare sul servo con movimento armonico e pulsanti per impartire ai servo controllati da arduino un movimento più simile a quello del corpo umano.

Se hai seguito i precedenti articoli sai di cosa sto parlando: l’idea di avvicinare il movimento di una mano robot a quello di una mano umana.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-con-movimento-armonico-e-pulsanti.html
Il progetto mano biomeccanica procede su due fronti: lato software sto lavorando per ottenere sei servo con movimento armonico, cioè tutti i servo devono muoversi ciascuno indipendentemente dagli altri ma con un movimento armonico proprio.

Lato meccanico Federico si sta occupando del montaggio della struttura e dell’automazione con cavi elastici, i tendini, e le minuterie necessarie al completo funzionamento. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/sei-servo-con-movimento-armonico-arduino.html
Il progetto della mano biomeccanica, come hai letto, fa uso di servo con movimento armonico, è una delle caratteristiche del progetto.

Per ottenere i servo con movimento armonico puoi partire dalla teoria descritta in questo articolo e proseguire la lettura di questo articolo in cui oltre ad un singolo servo ne aggiungi 4, so che le dita della mano biomeccanica sono 5 e che sommando anche il servo del polso sono 6.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/servo-con-movimento-armonico-con-arduino.html
Due giorni fa sul sito www.techtomove.com Federico, autore dello stesso, ha pubblicato le ultime evoluzioni del progetto che stiamo sviluppando insieme: la mano biomeccanica

Una settimana prima avevamo pubblicato, sullo stesso sito, l’articolo con il codice che rende armonico il movimento di un servo e sul quale sto ancora lavorando con lo scopo di realizzare uno sketch in grado do dare a tutta la mano un movimento armonico. Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/mano-biomeccanica-continua-lo-sviluppo.html
pilotare un servo con Arduino lo hai già imparato in alcuni dei miei precedenti articoli, ti mostro il risultato di alcuni esperimenti condotti sul controllo dell’andamento del servo, esperimenti condotti in collaborazione con Federico C., amico, appassionato di innovazione e tecnologia.

Hai già avuto modo di vedere alcuni dei progetti nati dalla mente di Federico e dalla nostra collaborazione: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/andamento-del-servo.html
Federico non smette mai di stupirmi ed ogni suo nuovo progetto deta in me molto interesse. Qiualche giorno fa mi ha scritto parlandomi di nuovi studi a cui si sta dedicando per il progetto: Mano biomeccanica.

Anche in questo progetto l’ispirazione di Federico viene dal corpo umano.
Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/mano-biomeccanica.html
Alcuni appassionati di arduino mi hanno segnalato la volontà di usare arduino per comandare due servo con i pulsanti, in pratica utilizzando 3 pulsanti per ciascuno dei servo motori è possibile spostare questi ultimi nella posizione desiderata.

il progetto in se non è molto complesso, devi procurarti il materiale seguente: Continua a leggere
Permalink link a questo articolo: https://www.mauroalfieri.it/elettronica/arduino-servo-e-pulsanti.html
Recupero 15 di 16 elementi rimasti...













 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza