Oggi lo spazio del Blog è dedicato a Paolo Piras che con ingegno e seguendo i tutorial sui motori passo-passo ha realizzato la sua prima CNC.
Paolo mi ha inviato le foto e la descrizione del progetto perché potesse essere condiviso con tutti gli utenti del Blog e perché sia di ispirazione per quanti come lui vogliono realizzarne una 🙂
Tuttavia questo tipo di motore, tanto utile in robotica, suscita sempre tanta curiosità e spesso le sole parole scritte negli articoli non sono sufficenti.
I motori passo-passo bipolari riservano altre modalità di funzionamento, tutte molto interessanti. Se usi la classe Stepper.h di Arduino puoi veramente sbizzarrire la tua fantasia.
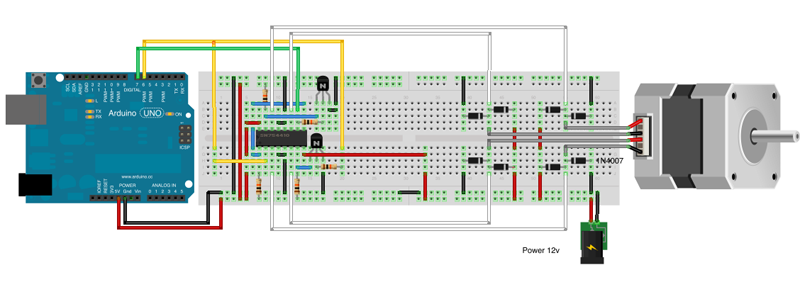
Non inserito il disegno sopra a caso, lo schema che puoi utilizzare per questo esperimento è identico a quello presentato nell’articolo precedente.
Sulla scia delle conoscenze acquisite grazie a Franco, ecco come puoi risparmiare 2 pin di Arduino per pilotare i motori passo-passo bipolari semplicemente aggiungendo all’SN754410NE, due transistor , cinque resistenze e otto diodi.
Riprendo quello che ha scritto Franco in merito a questa configurazione:
Oggi ho fatto qualche esperimento con il mio motore bipolare, Arduino e l’SN754410NE, nel precedente articolo: Motori passo-passo bipolari con Arduino – seconda parte hai imparato a pilotare un motore bipolare con Arduino, oggi imparerai come regolarne la velocità.
Nello schema in alto ho rappresentato il collegamento tra Continua a leggere
Nel precedente articolo hai imparato come funziona un motore bipolare, e forse hai già sperimentato lo sketch di esempio con il tuo Arduino.
Lo sketch proposto non è complesso, ripete una sequendi segnali in cui il valore HIGH si sposta lungo i 4 pin a cui è connesso il driver SN754410NE e di conseguenza il motore passo-passo.
Come avrai già letto il driver utilizzato non ha una sua intelligenza specifica, il suo scopo è consentirti di utilizzare tensioni e correnti superiori a quelle gestibili con Arduino e quindi pilotare motori con coppia elevata con Arduino.
Finita la serie di articoli sui Giochi di luce con Arduinoecco un articolo sui motori passo-passo. E’ molto tempo che non mi occupavo di motori passo-passo ed erano rimasti esclusi i motori bipolari.
Iniziamo subito riprendendo un mio precedente articolo in cui hai imparato a riconoscere i motori di tipo passo-passo. Dopo averli riconosciuti avrai letto come pilotare i motori di tipo unipolare, ma se hai riconoscuito che il tuo motore è di tipo bipolare, probabilmete ti sei chiesto … e adesso come lo piloto questo?
In questo articolo passiamo alla pratica 🙂 realizziamo il circuito di test.
Inseriamo sulla BreadBoard il nostro integrato ULN2003A come in Figura 1
Figura 1
Affianchiamo Arduino e la BreadBoard in modo da poter facilmente posizionare i fili di collegamento tra le porte 8,9,10 e 11 di arduino ed i terminali 1,2,3 e 4 dell’ULN2003A come visibile in Figura 2
Hai imparato a riconoscere i motori di tipo passo-passo ed hai anche trovato un metodo per dare una corrispondenza tra i terminali che vi fuoriescono e le fasi di cui il motore è composto.
In questo secondo articolo leggerai dei motori passo-passo unipolari a 6 fili.
Inoltre imparerai a riconoscere la corrispondenza tra conduttori e le bobine.
I motori passo passo ( o stepper ) sono classificati in due tipologie distinte:
unipolari
bipolari
i motori unipolari sono più semplici da pilotare in quanto la sequenza della rotazione è esperessa dal succedersi dell’eccitazione delle bobine di cui è composto; i motori bipolari sono di maggiore complessià in quanto la rotazione avviene con un campo magnetico generato dalla corrente che percorra in entrambi i versi le bobine.
Da sottolineare la maggiore forza sviluppabile da un motore di tipo bipolare nei confronti dell’unipolare in quanto a insistere sulla rotazione sono 2 avvolgimenti in contemporanea e non uno solo (vedi Figura 1).
I motori passo-passo sono particolari motori in corente continua la cui rotazione è ottenuta mediante l’eccitazione in sequenza degli avvolgimenti in esso contenuti.
Sono anche chiamati step-to-step o stepper per indicarne il caratteristico movimento per step (passi) successivi.
La differenze maggiori con i comuni motori in corrente continua sono: Continua a leggere











 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza