
Ti ha incuriosito il mio articolo dedicato all’Adaptive gripper 3D printed ? Ha generato in te la curiosità ed il desiderio di realizzartene uno?
Accontentato !!! Oggi ti mostrerò come puoi realizzarti il tuo adaptive gripper 3D printed con l’uso di una stampante 3D e la forza della condivisione.
Inizio subito dal video di montaggio:
La condivisione è futuro
L’ultima informazione che hai letto nell’articolo “Adaptive Gripper” si riferiva al progetto “Tri_Max_Gripper” di Chiprobot:

Fonte: Thingiverse
il cui lavoro è fondamentale per realizzare l’adaptive gripper 3D printed.
La forza della condivisione, che da sempre sostengo, puoi leggerlo anche nello slogan del blog di George Bernard Shaw, è sempre stupefacente.
L’esempio dell’adaptive gripper 3D printed è eclatante: grazie al lavoro di Chiprobot che dopo averlo disegnato e realizzato per se ha deciso di mettere i file in condivisione.
In questo modo puoi realizzare il medesimo oggetto con la tua stampante 3D senza doverlo ridisegnare.
Non avrei rispettato la mia propensione alla condivisione e le regole in cui credo dell’open hardware senza contribuire al progetto.
Ho eseguito delle modifiche per adattare il progetto al mio specifico uso ed ho condiviso la modifica nuovamente; in risposta Chiprobot:
ringrazia pubblicamente.
Adaptive gripper 3D printed modificato per nema 17
La modifica che ho apportato ( puoi vedere le modifiche qui ) alla versione originale dell’adaptive gripper 3D printed è sostanzialmente la possibilità di aggiungerci un motore nama 17 ed un perno M5:
il primo passo è stato importare i files STL del progetto Tri_Max_Gripper in openScad:
- Front_Actuator_Holder_Blue.stl
- Support_beam_000_red.stl
- Appendage_000_Yellow.stl
e disegnare i componenti mancanti:
- il corpo cilindrico in blu
- il connettore per nema 17
- il supporto a cui collegare le dita dell’adaptive gripper 3D printed
Puoi scaricare i file modificati e quelli ripresi dal progetto originale qui: thingiverse.com 2316823
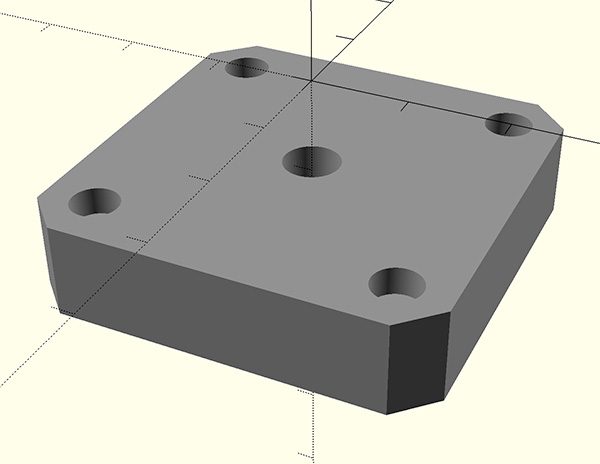
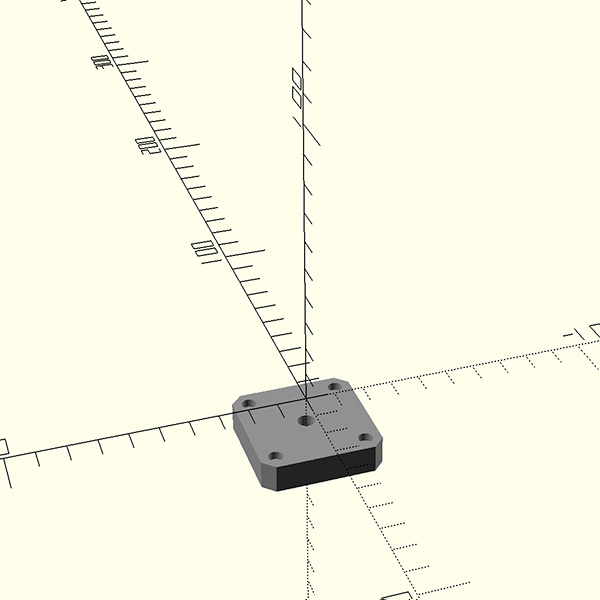
Inizio con il blocco nema 17 che ho riprodotto partendo dalle misure standard di questo tipo di motore:
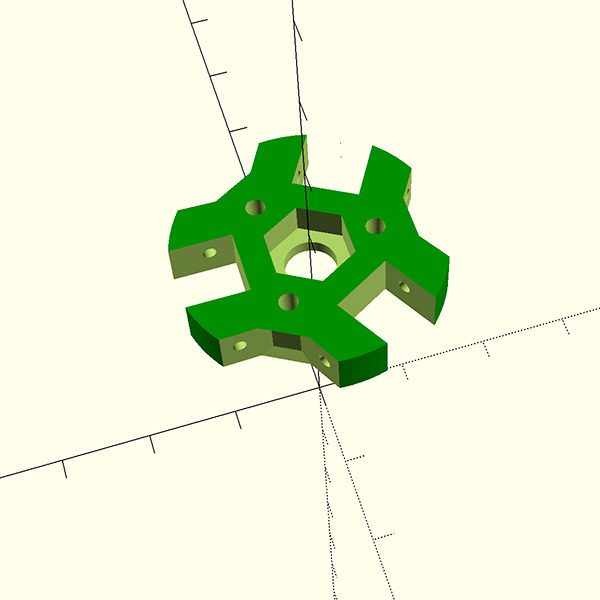
successivamente ho ridisegnato il supporto a cui sono connesse le “dita” in modo che potesse ospitare un dado M5 standard ed avesse un foro da 5.5mm per inserire la vite:
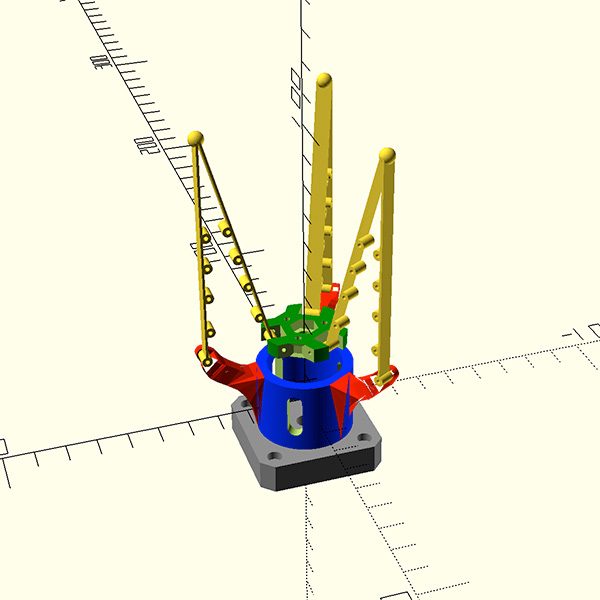
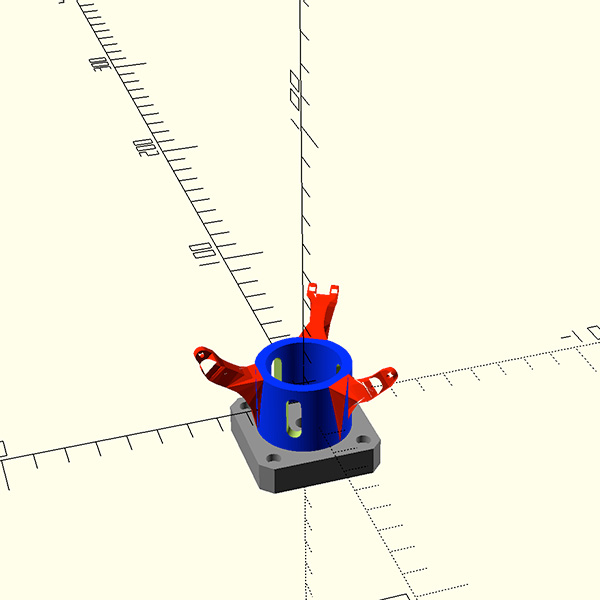
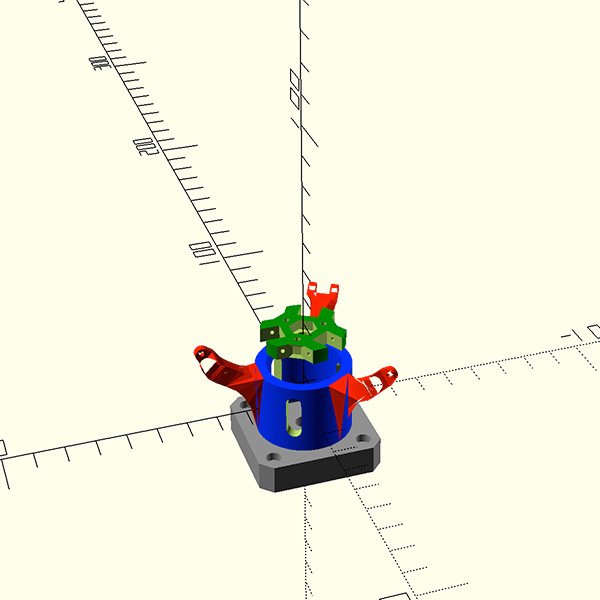
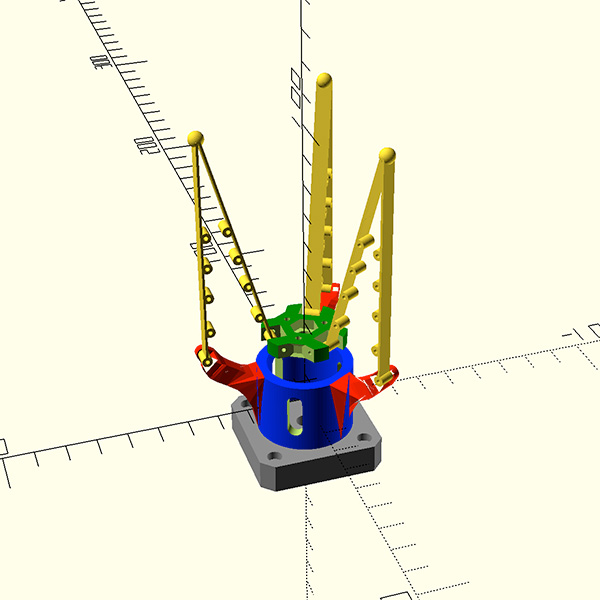
ho verificato che ciascun componente fosse correttamente posizionato al fine di verificare la fattibilità del progetto prima di stamparlo. Ecco i passaggi:
in cui puoi notare il montaggio virtuale dell’adaptive gripper 3D printed prima di passare alal fase di stampa e di montaggio.
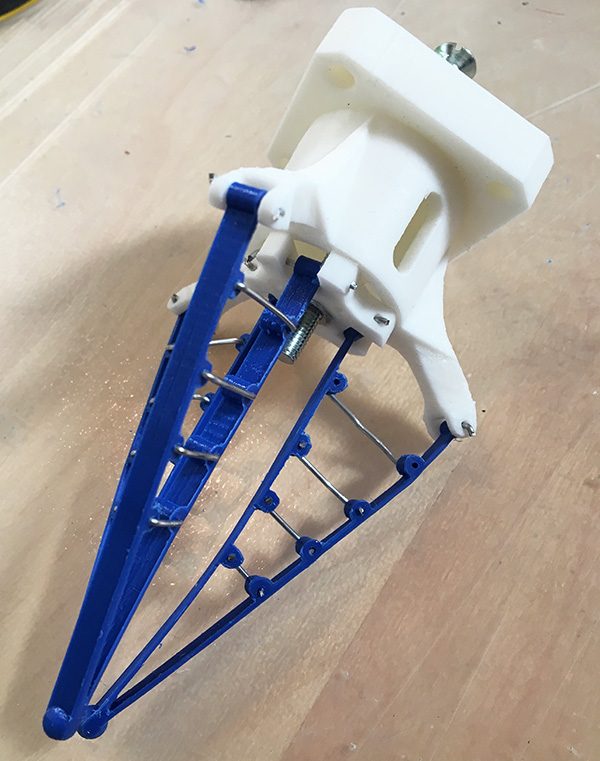
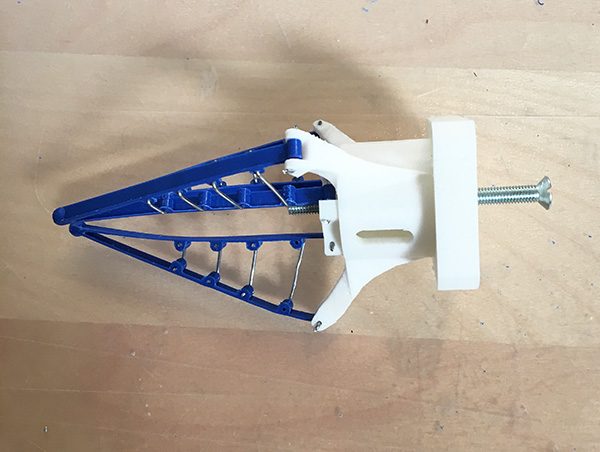
Al termine del montaggio, che puoi seguire nel video:
otterrai la tua versione controllabile con un nema 17:
e con arduino o altro micro controllore.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 commenti
Good morning, I’m Eva.
I would like to know what type of resin you have used to print the 3 ends of the gripper. Is it soft pla or another?
Thank you
Autore
Hi Eva,
I used some classic PLA, usually I use an Italian product: Filoalfa.