
La robotica ed in particolare lo studio della mano mi ha condotto negli ultimi giorni all’adaptive gripper
In particolare il video sopra ti mostra un esempio di adaptive gripper derivato dagli studi eseguiti da FESTO FinGripper.
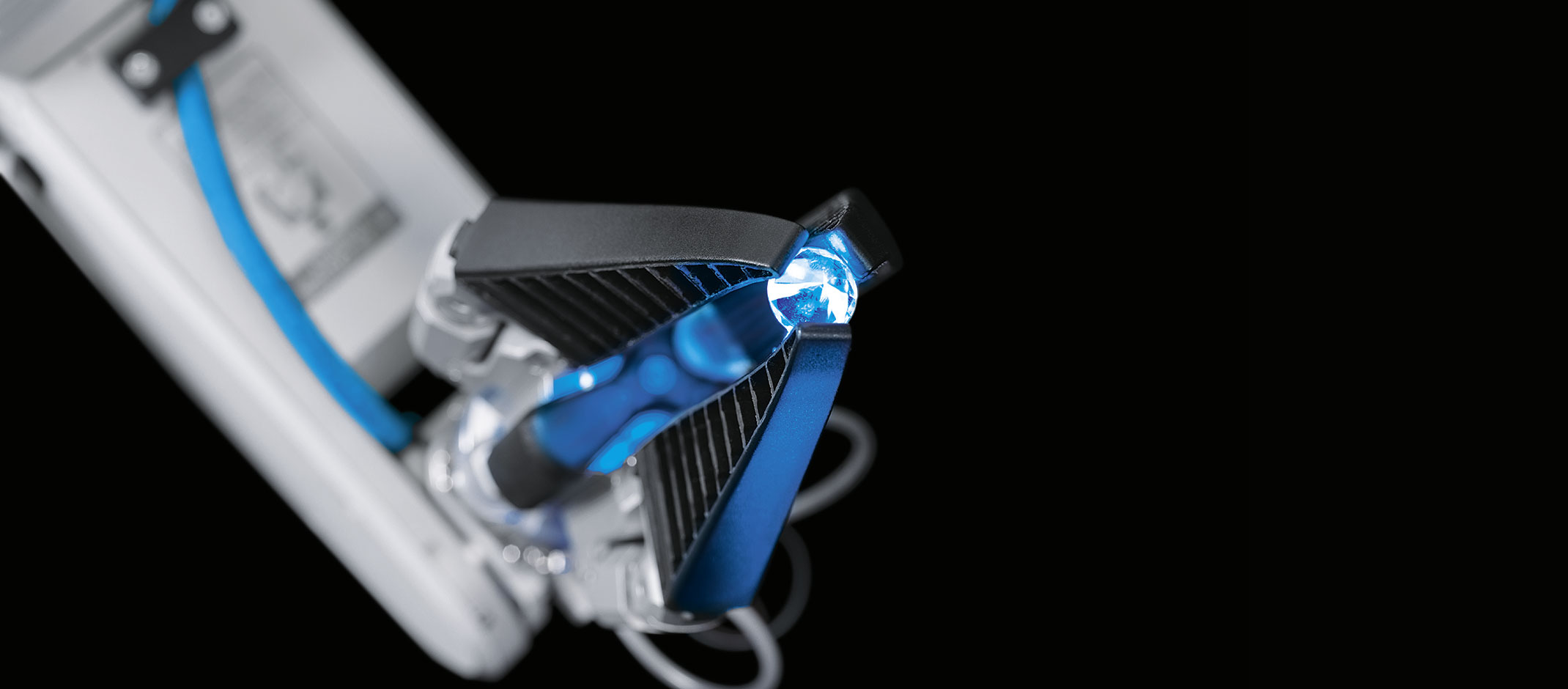
Fonte: www.festo.com website
L’adaptive gripper studiato da FESTO, come molti degli studi pubblicati dall’azienda, sono di estremo interesse per la robotica.
La particolarità è quella, come vedi, di potersi facilmente adattare all’oggetto che deve afferrare grazie alla sua particolare conformazione:

Fonte: hackaday.io web site
sul sito hackaday.io ho trovato, non solo, la foto della presa di una mela ma anche alcuni dettagli interessanti sulla realizzazione.
Il sistema di movimento: apertura e ciusura delle dita è delegato ad un motore stepper o passo-passo.
Il motore controlla direttamente un perno sul quale scorre il disco interno:
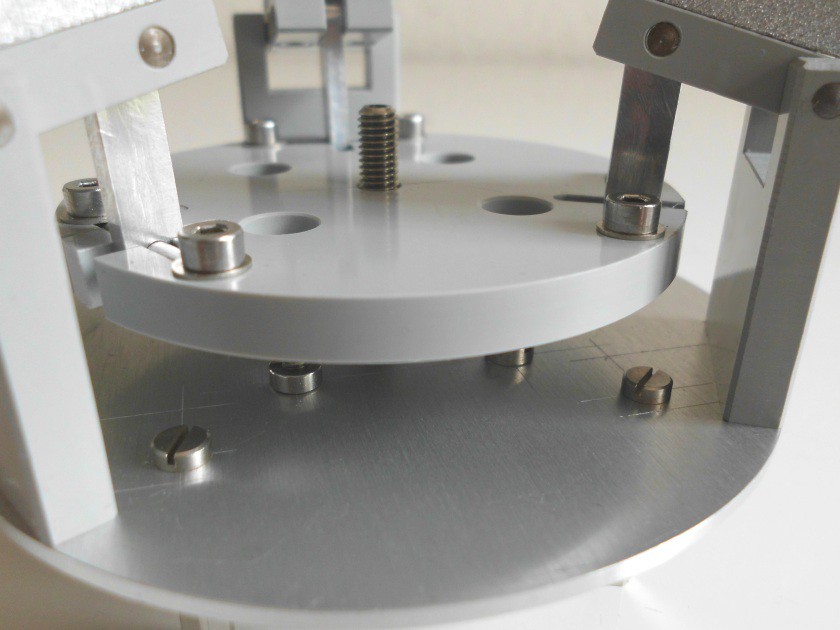
Fonte: www.hackaday.io
a cui sono legate le estremità interne di ciascun dito dell’adaptive gripper.
Il sistema originale studiato e mostrato dalla FESTO:

Fonte: www.festo.com
è molto simile a quello delle foto e del video, per cui incuriosito ho cercato qualche progetto maker.
Adaptive gripper 3d
La ricerca mi ha condotto prima a questo video:
in cui il sistema è sempre ispirato all’adaptive gripper della FESTO ma riprodotto con una stampante 3D.
E nella descrizione del video puoi trovare anche il link al progetto pubblicato su http://www.thingiverse.com da cui puoi scaricare i file stl.
Il mio piccolo e personale contributo è stato scaricare i file del progetto e montarli in un file OpenSCAD:
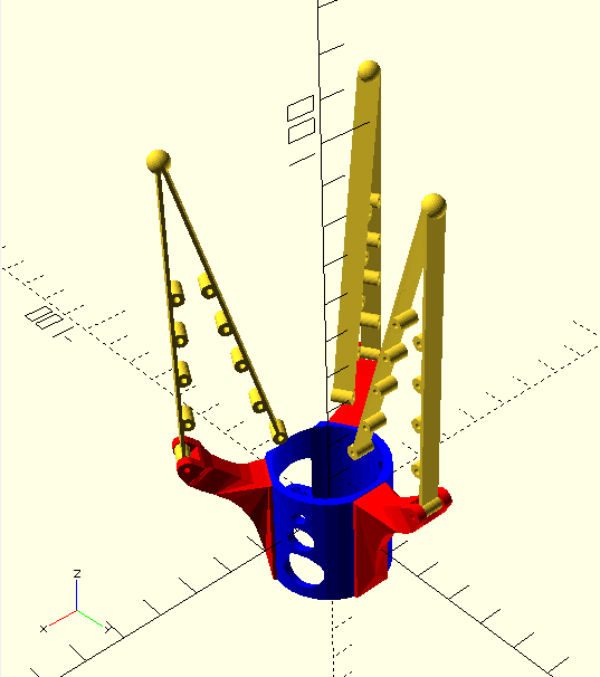
in cui come vedi manca la parte centrale in quanto ho deciso di adattare il progetto ad un motore passo passo, ed una volta ultimato provvederò a pubblicare un fork del progetto.
In rete ho trovato un’immagine ufficiale FESTO sulla realizzazione dell’adaptive gripper:
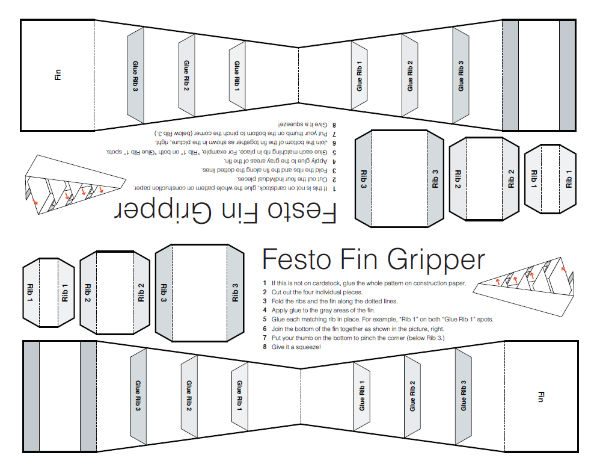
il disegno ti spiega come è realizzato un dito e funziona da cartamodello per la realizzazione delle stesse.
Buona realizzazione.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
1 ping
[…] informazione che hai letto nell’articolo “Adaptive Gripper” si riferiva al progetto “Tri_Max_Gripper” […]