
Inizia l’ultima settimana delle feste natalizie e ti propongo il progetto di Carlo Villoresi: Albero Robot
Il progetto Albero Robot è davvero interessante perché oltre all’idea c’è la realizzazione davvero ben fatta da Carlo che mi ha inviato tutto il materiale che riporto in questo e nei prossimi articolo dedicati al progetto.
L’albero robot è un progetto complesso e per analizzarlo in modo corretto Carlo lo ha diviso in 5 fasi che ho riunito in 3 articoli per questa settimana.
Lascio a Carlo la decsrizione del progetto:
Descrizione del progetto “Albero Robot”
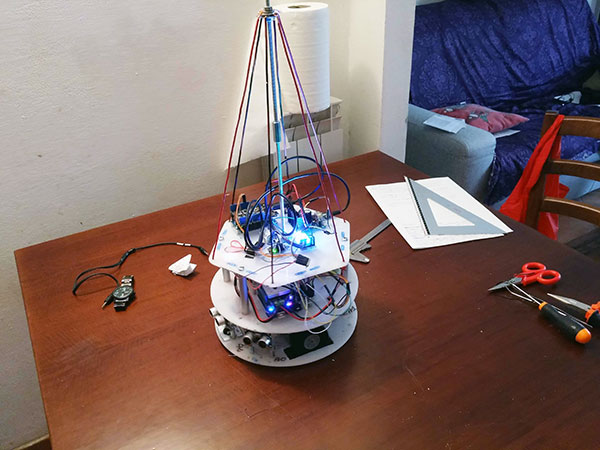
Il progetto in questione riguarda la costruzione di un piccolo robot natalizio.
In pratica si tratta della riproduzione di un abete natalizio capace di muoversi, evitare gli ostacoli, eseguire dei brani musicali (natalizi) ed infine generare una combinazione di effetti luminosi.
Lo scopo è solo quello di rendere l’ ambiente domestico più divertente nel periodo natalizio, introducendo un piccolo e buffo robottino dalle semplici funzioni che però si presta ad uno sviluppo ulteriore delle stesse per chi ne ha voglia.
Tale robot ha infatti una struttura modulare per cui è possibile considerarlo come un robot laboratorio dove aggiungendo o togliendo uno o più piani è possibile configurarlo per ottenere obbiettivi assai diversi tra loro.
Questo è comunque solo un prototipo nato dal mio personale desiderio di realizzare un buffo robot natalizio, abitudine che vorrei seguire negli anni a venire.
Probabilmente qualcosa è stato tralasciato,vuoi per mancanza di tempo, vuoi per non esagerare nella descrizione che in alcuni aspetti dimostrerebbe aspetti costruttivi ovvi.
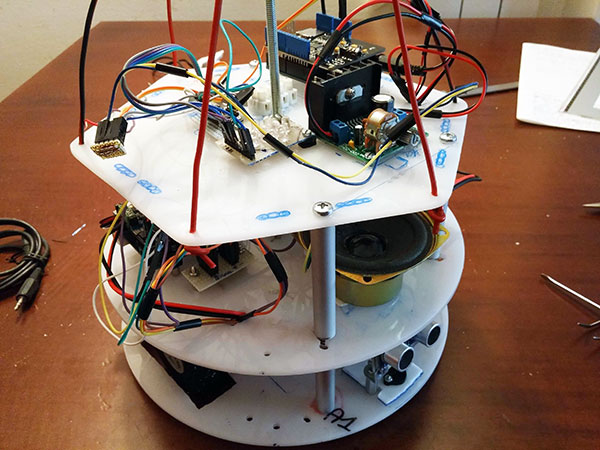
Montaggio parte meccanica
Il montaggio viene realizzato impilando tre piani ed utilizzando i tubi di supporto filettati:
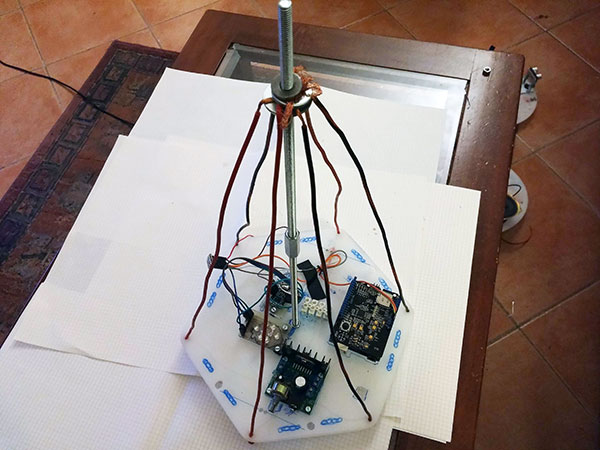
La barra filettata, necessaria alla costruzione dell’ intelaiatura dell’ albero natalizio, viene fissata al centro del secondo pannello superiore tramite due dadi sopra e sotto il pannello:
mentre i cavi dello scheletro albero vengono fissati al pannello utilizzando i corrispondenti fori praticati ai vertici dell’ esagono.
La parte sommitale dei cavi viene fissata dal sistema di dadi e rondelle presente in cima alla barra filettata:
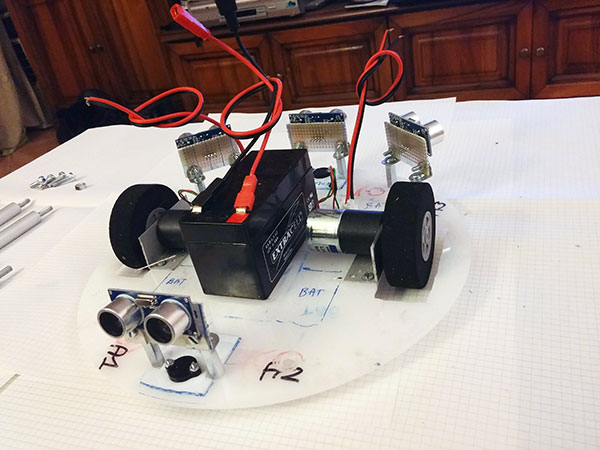
Il meteriale necessario per la realizzazione della parte meccanica è stato elencato da Carlo per ciascuna parte del robot e la riporto di seguito cercando di associare a ciascun ripiano la foto corretta:
Parti Meccaniche per il montaggio
Base
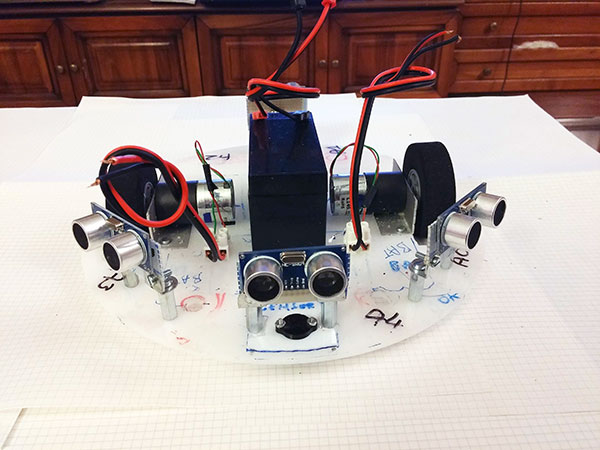
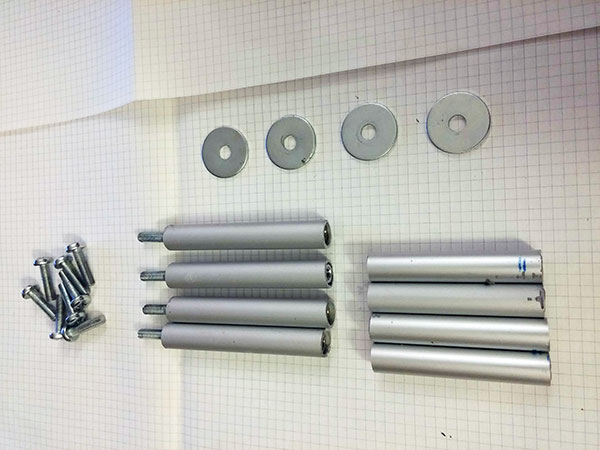
Un cerchio di plexiglass bianco, spessore 4 mm e diametro 250 mm;
4 tubi di alluminio con lunghezza di 65 mm e diametro di 12 mm, provvisti di filettatura interna per avvitatura;
4 rondelle di diametro 24 mm e diametro interno sufficiente per il passaggio delle viti;
4 viti di diametro 5 mm e lunghezza 19 mm;
8 distanziali a sezione esagonale con filettatura interna;
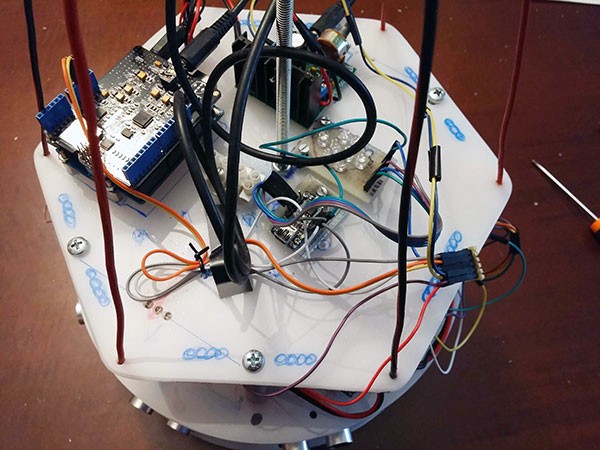
Primo pannello superiore

- Un cerchio di plexiglass bianco, spessore 4 mm e diametro di 250 mm;
- 4 tubi di alluminio con lunghezza di 80 mm e diametro di 12 mm;
- 8 distanziali (stesse dimensioni dei precedenti);
- 4 barre filettate di lunghezza 40 mm e diametro 5 mm ( costituiranno le viti che fuoriescono da una estremità dei tubi precedentemente menzionati);
Secondo pannello superiore
 Un esagono di plexiglass bianco, spessore 4 mm con il lato di 125 mm;
Un esagono di plexiglass bianco, spessore 4 mm con il lato di 125 mm;- 4 viti di diametro 5 mm e lunghezza 19 mm;
Scheletro albero di natale e intelaiatura
- Una barra filettata di diametro 5.5 mm ( a scelta ) e lunghezza 400 mm ( a scelta );
- 4 dadi di fissaggio da avvitare alla barra precedente;
- 3 rondelle di diametro esterno 24 mm da aggiungere ai dadi di fissaggio precedenti;
- 6 cavi di rame schermato di spessore per costruire l’ intelaiatura mediante fissaggio al
- pannello superiore 2 ed alla sommità della barra filettata;
Ruote
- Due ruote in foam di diametro 60 mm e larghezza 18 mm;
- Due ruotini Ball Caster con ruota di diametro 12 mm;
Supporti
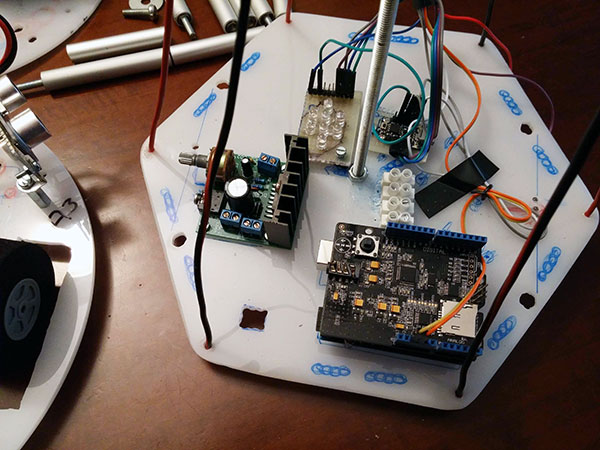
- 4 basette millefori supporto per i sensori (da saldare i piedini direttamente sulla basetta);
- Varie basette millefori per distribuzione tensione 5v;
Nei prossimi articoli ci dedicheremo alla realizzazione elettronica ed alla programmazione del robot.
Ecco una sequenza di montaggio realizzata da Carlo:










 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
1 ping
[…] « Albero Robot di Carlo Villoresi […]