
Il progetto bionic hand evolution che sto realizzando con Federico ed in collaborazione con la Partec S.r.l. continua la sua evoluzione.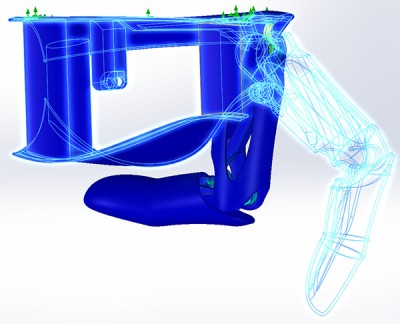
Negli ultimi mesi dal 13 giugno, giorno in cui ho scritto l’articolo di presentazione siamo arrivati alla realizzazione del prototipo con tutte le dita e 6 gradi di mobilità:

Il mio contributo nel progetto è l’elettronica ed il controllo della bionic hand evolution attraverso l’uso di attuatori che abbiamo scelto in fase di progetto e che ho provveduto ad acquistare.
La meccanica del movimento
Il movimento della bionica hand evolution a cui mi riferisco è quello puramente elettromeccanico ossia quello che le dita potranno compiere grazie agli attuatori della firgelli che in questo promo prototipo si sono rivelati utili sopratutto per evitare un complesso lavoro di progettazione di questi componenti.
Mi sono dedicato allo studio ed alla comprensione del funzionamento di questi attuatori per poter sviluppare uno sketch arduino in grado di sfruttare al massimo le potenzialità offerte da questo componente ed ottenere il movimento più realistico possibile.
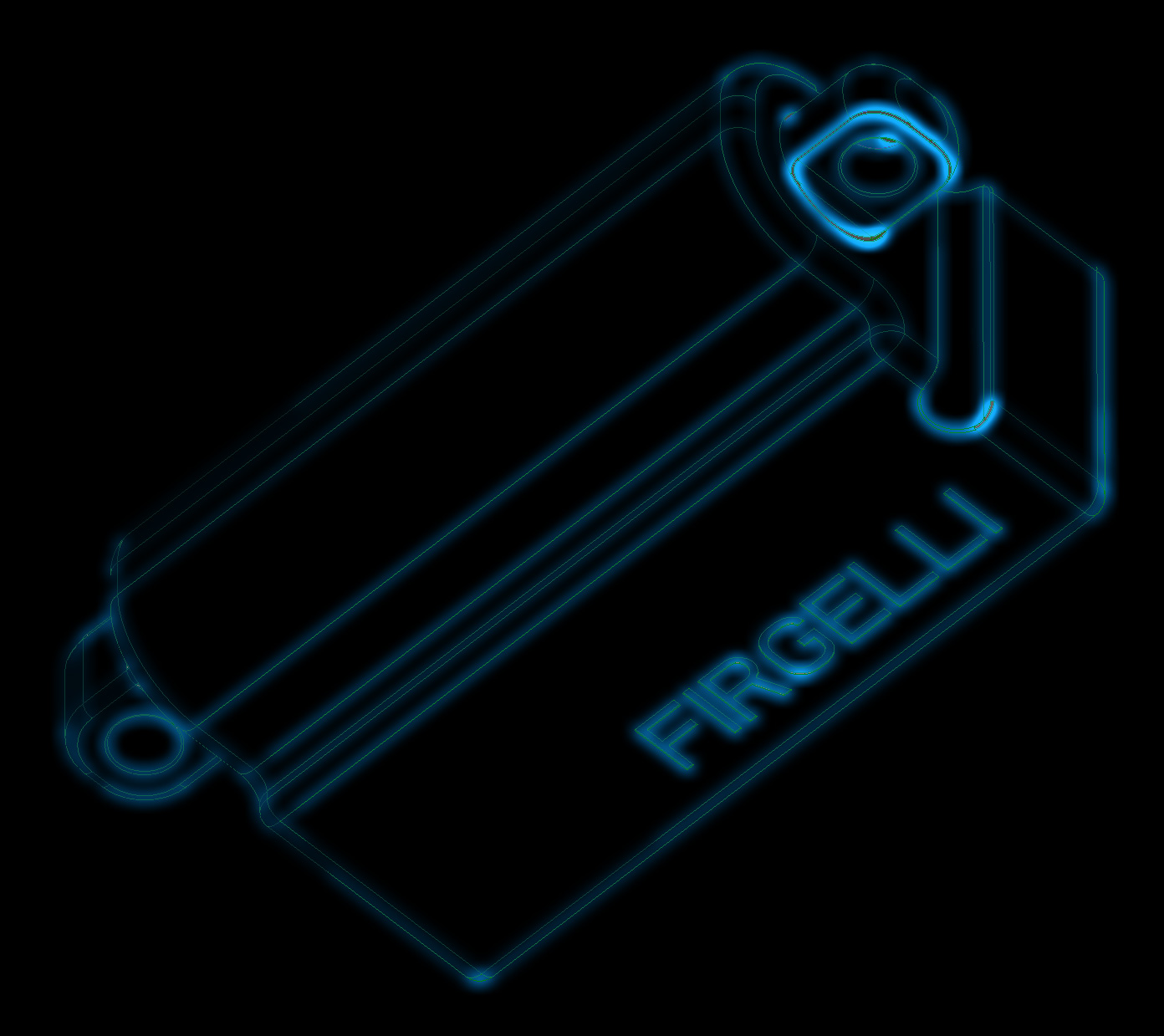
Gli attuatori
Ogni attuatore si presenta in una confezione cilindrica il cui contenuto è:
- l’attuatore delle caratteristiche scelte
- il connettore nero per cavo flessibile a 5 poli
- minuterie di montaggio meccanico come viti, bulloni, staffe

ciascun attuatore che useremo per la bionic hand evolution presenta un proprio cavo flessibile a 5 poli:
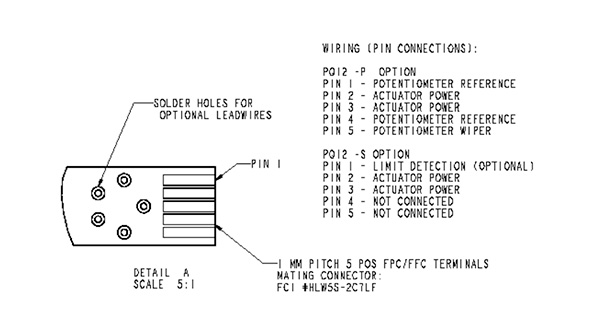
ho preso questa figura dal datasheet ufficiale firgelli.
Il modello scelto per la bionic hand evolution è il “P” in cui la lettera P indica la presenza di un potenziometro connesso all’asta di estensione dell’attuatore che restituisce un feedback di posizione.
Lo sketch arduino deve essere in grado di controllare sia il motore responsabile dell’azione sia di verificare al contempo la posizione dell’attuatore mediante il feedback che il potenziometro restituisce.
Il concetto di funzionamento è simile a quello di un servocomando di quelli che sei abituato a vedere nei negozi di robotica o modellismo con la sola differenza che in questo caso non hai a disposizione il circuito integrato presente nei servocomandi che si preoccupa del controllo di posizione in base ai gradi che imponi e devi strutturare lo sketch in modo che si preoccupi anche di questo aspetto.
Passo uno della realizzazione elettronica
Il primo passo è far in modo che i connettori a 5 poli su contatti flessibili possano essere connessi al circuito di controllo che realizzerò con dei driver motori.
Il cavo flessibile non è facile da saldare e per questo Firgelli fornisce un adattatore a cui è possibile saldare dei cavi di connessione.
Ecco i cavi pronti:
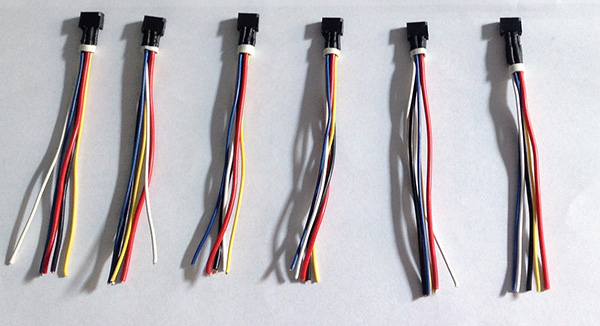
ho usato un colore differente per ciascuno dei 5 contatti lasciando che il cavo rosso ed il cavo nero fossero di sezione superiore visto che sono collegati al controllo del motore, mentre i cavi più sottili sono quelli connessi al potenziometro.
Il risultato pronto per essere collegato ad arduino ed alle motro schield scelte per la bionic hand evolution:

Il video
Federico ha iniziato il montaggio della mano con il primo degli attuatori ed eseguito il primo sketch realizzato; ecco il video realizzato nella fase di test.
Tutti i riferimenti del progetto puoi trovarli sul sito ufficiale youbionic.com

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 commenti
Ciao! Sto seguendo questa interessante iniziativa che stai portando avanti con molto interesse e avrei alcune domande da farti… Qui si sta parlando di protesi attive che sfruttano attuatori per dare i necessari gradi di libertà (5 delle falangi e uno in più per avere il pollice.. Opponibile
Autore
Ciao Matteo,
si hai compreso il senso più generico del progetto, ci sono altri aspetti quali la possibilità di stampare la protesi in 3D e di auto costruirsela che sono meno immediati ma scritti nell’articolo se letto con attenzione.