
Ultimamente hai notato che ho dato molto spazio a giovani maturandi che come Franceschetti Enrico hanno da pochi giorni sostenuto gli esami di maturità con progetti come il braccio robot o la mano robot di Gabriele.
Sia Gabriele sia Enrico hanno superato l’esame con ottimi voti, almeno mi hanno riferito così, ed io gli credo perché entrambi i progetti li troverai davvero eccellenti.
Dividerò questo progetto in più articoli per dedicare il giusto tempo a ciascun articolo. Anche Enrico ha suddiviso la sua tesina in capitoli ciascuno dedicato ad un aspetto del progetto stesso.
Presentazione del progetto a cura di Enrico
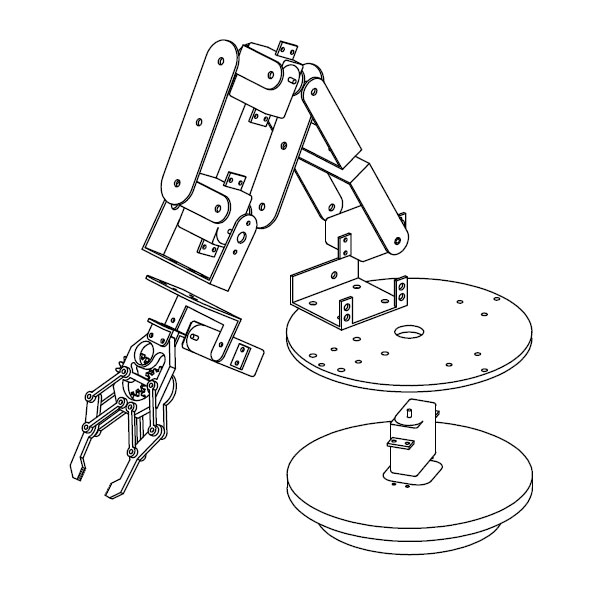
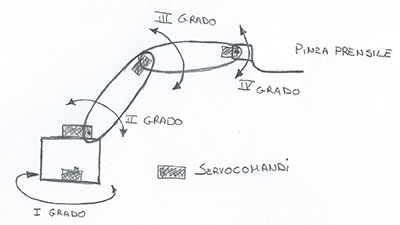
Il progetto consiste nella realizzazione di un braccio robot a 4 gradi di libertà, 3 snodi sul braccio e una piattaforma girevole, ognuno dei quali con un arco di lavoro di 180° . (più uno sulla pinza).
Il movimento delle “articolazioni” e ottenuto grazie all’utilizzo di servocomandi opportunamente inseriti.
La costruzione della struttura è stata realizzata grazie ad alcuni macchinari quali piegatrici, trapani e frese.
I 5 servo comandi sono collegati e gestiti dal “cervello”, si tratta di una scheda elettronica a microcontrollore (AT MEGA 328) Arduino uno.
Ho diviso la progettazione e la realizzazione in fasi, illustrate e spiegate.
Prima Fase: realizzazione del prototipo
Come ogni progetto maker che si rispetti prima Enrico ha disegnato il prototipo per definire i gradi di libertà:
e le parti principali del braccio robot:
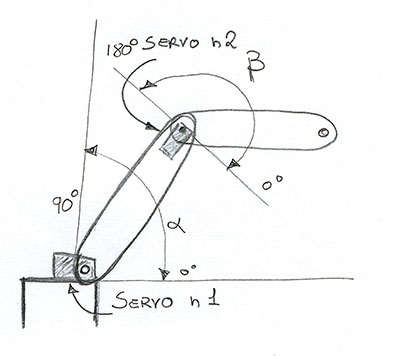
per comprendere la fattibilità di quella che all’inizio è solo un’idea.
Compresi i gradi di libertà o mobilità del braccio robot e il numero di componenti necessari passi alla scelta vera e propria dei componenti.
I componenti scelti da enrico sono:
– n.1 arduino uno
– n. 5 servo dt201ln ( produttore DFRobot )
– n. 1 basetta millefori
– cavetti e pin per eseguire i collegamenti sulla millefori
– lamierini e minuterie meccaniche per la realizzazione della parte meccanica
I servo scelti da Enrico
Per la scelta dei servo da utilizzare riporto le parole di Enrico:
l mio modello è un dt201ln con le seguenti specifiche:
- Voltaggi: da 4.8 a 7 .2V
- Corrente: 180mA a 4.8V; 220mA a 6V; 260mA 7.2V
- Velocità di rotazione 0.045 s x grado (4.8V); 0.035 sec x grado (6.0V); 0.02 sec x grado (7.2V)
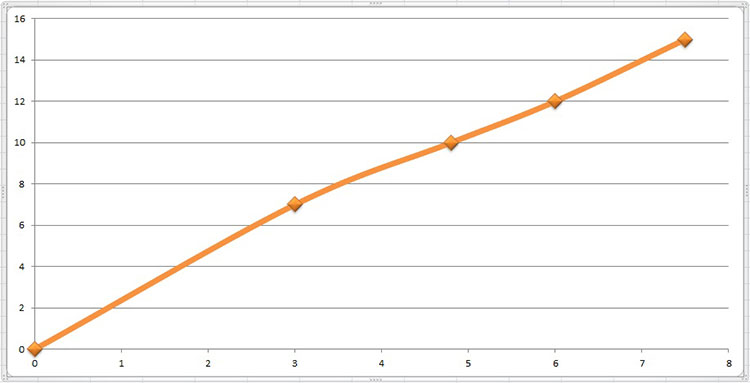
- Forza di torsione: 10Kg·cm(4.8V); 12KG·cm(6V); 15KG·cm(7.2V)
- Temperatura di utilizzo: 0-60 celsius
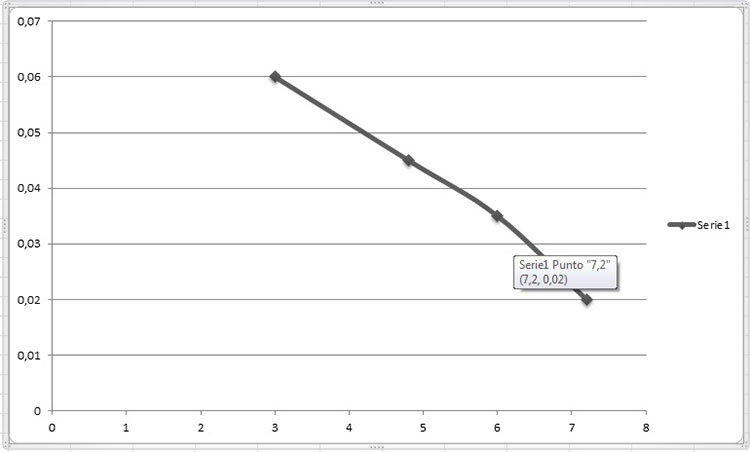
Dal datasheet del mio modello ho ricavato il grafico voltaggio/coppia
In questa sede tratterò solo gli analogici perché sono i più diffusi e più economici. Vengono chiamati analogici in quanto il posizionamento del perno viene fatto controllando la rotazione di un piccolo potenziometro posto all’interno del servocomando e messo in movimento dagli stessi ingranaggi che muovono il perno, facendo ciò si cambia il valore della resistenza del potenziometro (collegamento in sistemi) che viene elaborata e trasformata in gradi ( funzione di trasduttore resistivo/angolare).
Da un servocomando fuoriescono 3 fili: due sono per l’alimentazione e generalmente sono nero o marrone per il negativo e rosso per il positivo; il terzo filo, quello destinato al segnale di comando generalmente è giallo.
Il segnale di comando è costituito da un’onda quadra inviata ripetutamente: il fronte positivo deve avere una durata compresa tra 1 e 2 millisecondi e l’ampiezza dell’onda deve essere di circa 20mSec (frequenza: 50 Hz). Il segnale fatto in questo modo deve essere inviato di continuo se si vuole che il servocomando, sotto sforzo, mantenga la posizione desiderata.
Seconda Fase: realizzazione del primo prototipo
Enrico dopo aver definito il materiale da utilizzare e gli schizzi preliminari ha anche realizzato un primo prototipo di cui mi ha inviato qualche foto.
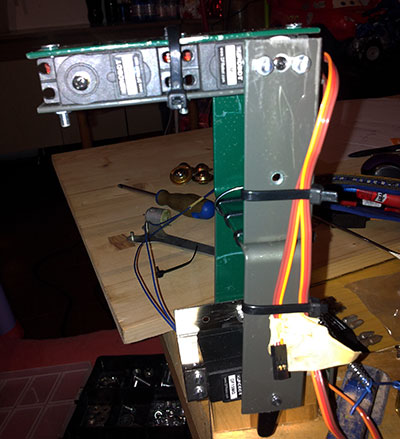 In cui puoi vedere delle semplici strutture in lamierino la cui funzione è supportare i servo scelti, di cui alcuni particolari:
In cui puoi vedere delle semplici strutture in lamierino la cui funzione è supportare i servo scelti, di cui alcuni particolari:

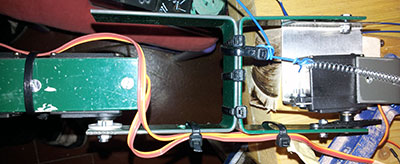
come l’avambraccio collegato a quello che potrebbe essere il bicipite del tuo braccio robot:
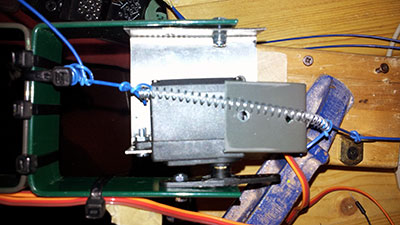
o il particolare della molla di recupero che aiuta i servo a riportare in posizione il braccio dopo i movimenti di estensione che sono i più onerosi in termini di peso e leve:
Enrico ha anche realizzato il grafico della velocità che i servo possono sviluppare:
Il video del movimento di test
Il braccio robot di test realizzato come prototipo da Enrico è già in grado di muoversi ed Enrico ha realizzato un video a prototipo ultimato:
Bravissimo Enrico !!!

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
10 commenti
2 ping
Vai al modulo dei commenti
Quali altri servo potrei utilizzare molto simili a questi (braccio robotico di Francesco)? Siccome sono un po’ cari. Grazie
Autore
Ciao Ermido,
lascio il tuo commento visibile perché altri possano darti la risposta che cerchi.
Ciao Mauro,
vorrei realizzare, a scopo didattico, il braccio robotico di Francesco. Ti chiedo se è possibile avere il disegno dei pezzi che compongono braccio e base rotante. Grazie Silvio
Autore
Ciao Silvio,
tutto quello di cui dispongo è pubblicato on-line.
Lascio il tuo commento in modo che Enrico possa risponderti leggendo la tua richiesta.
Volendo si possono realizzare due gambe che si muovono distintamente attaccate ad un busto?
Autore
Ciao Simone,
puoi fare tutto quello che desideri lavorando con la meccanica e l’elettronica adeguate.
salve , sono un studente che quest’anno dovrà affrontare la maturità, e vorrei cercare di ricreare esattamente questo progetto. Ho però dei dubbi… quali servomotori ha utilizzato ? ovvero Enrico dice di averne utilizzati 5 ma li ne sono elencati solo tre tipi, mica potrebbe elencarci più precisamente i servomotori utilizzati? dopodiché volevo chiederle come viene mosso il braccio robotico, mi spiego meglio, il braccio viene mosso mediante un joystick o un programma al computer( se si ci fornirebbe il nome?) ? infine la vorrei ringraziare per il tempo a noi dedicato e le vorrei fare un’ultima richiesta se ci può fornire l’e-mail di Enrico Franceschetti cosi da parlare con il diretto interessato senza stare a commentare tutte le volte…. cordiali saluti
Autore
Ciao Michael,
è davvero un bel progetto.
Se cerchi nel Blog “Franceschetti Enrico” troverai tutti gli articoli del progetto, inclusi schemi, dettagli e sketch.
Se lo usi per il tuo esame sono certo che a Francesco possa solo far piacere … ricordati di citarlo nella tesi di accompagnamento ed di mettere il link al progetto ( Vedi licenza ) in modo che non ti possano contestare di aver copiato ma sarai tu a evidenziare le differenze tra il tuo progetto e quello di Francesco che ti ha ispirato.
Non sono autorizzato a fornire l’email di Francesco, posso dirti che il tuo commento sarà certamente letto da Francesco che potrà risponderti.
Salve, andando a cercare sul sito DFRobot il modello citato da Enrico “dt201ln” non mi trova niente..
Mentre se cerco questo “dt201ln” nella pagina principale di Google mi trova nel primo risultato questo servomotore dallo stesso sito, che però non ho la minima idea che possa andare bene.. per favore, rispondete al piu presto
qui vi lascio il link del servo motore..
https://www.dfrobot.com/product-120.html
Non vorrei spendere soldi inutilmente.. dato il tanto che costano.. e doverne prendere 5 senza poi nessuno scopo..
cordiali saluti,
Fabio
Autore
Ciao Fabio,
lascio la risposta ad Enrico che è autore del progetto.
Ti invito a valutare se le caratteristiche dei servo esposte possano andar bene nel tuo progetto ed eventualmente acquistare anche un prodotto differente che risponda alle tue esigenze senza acquistare ciecamente quello suggerito ignorando le potenzialità.
[…] braccio robot di Enrico […]
[…] Braccio robot di Franceschetti Enrico […]