
DIY robot è una piccola raccolta di esperimenti ed esempi che nelle ultime settimane hanno attirato la mia attenzione.

I progetti DIY sono due ed entrambi sono comparsi su Hackaday a distanza di due giorni:
Mentre il terzo è uno studio della Festo pubblicato in questi giorni: BionicFinWave
Snakes DIY robot
Il primo DIY robot è un lavoro davvero interessante eseguito e condiviso da Steven Dufresne che lo ha condiviso con tutti maker e gli appassionati di robotica come te e me.
Il progetto making robot snakes that slither sidewind and strike, come dice il nome, è in grado di strisciare lateralmente e di eseguire un attacco come farebbe un serpente.
Steven ha raccontato il suo progetto nel dettaglio sia sul sito hackaday sia nel video.
Il movimento è possibile usando il sistema di grip, realizzato da Steven, inspirato a quello della pelle dei serpenti in natura:

DIY robot parte dal principio che il progetto possa essere replicato con una stampante 3D ed i disegni del progetto condivisi dall’autore.
E’ certamente questo il caso del robot snake che puoi scaricare qui in cui trovi sia i file STL sia gli sketch per arduino.
DIY robot 3D printer robot actuator
DIY robot 3D printer robot actuator è un progetto maker in cui Jenny List ha pubblicato la realizzazione di una giunzione robot DIY.
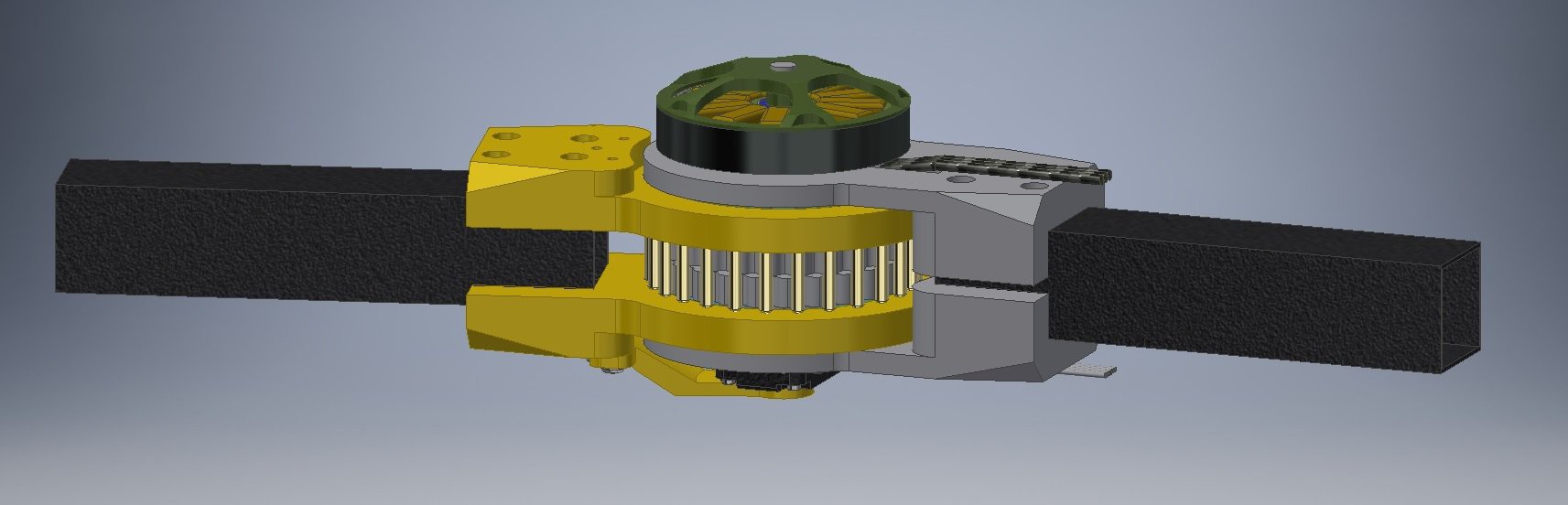 Le componenti 3D puoi realizzarle in FDM ed il motore brushless genera il movimento mostrato in questo video:
Le componenti 3D puoi realizzarle in FDM ed il motore brushless genera il movimento mostrato in questo video:
Nota che nella fase di montaggio del progetto, nel video, usi un sensore di posizione, AS5147, per ottenere un feedback dell’angolo raggiunto dalla giunzione.
Il driver di controllo per il motore brushless è di tipo DRV8305 la cui potenza è incrementata da 6 mosfet di tipo N come puoi vedere in questa immagine:
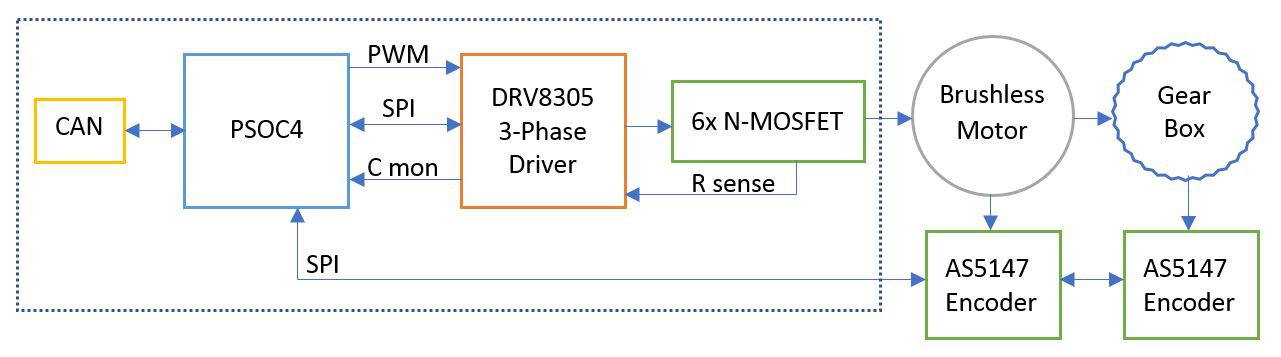
in cui è riportato tutto lo schema a blocchi del progetto.
BionicFinWave
Non si tratta di un DIY robot come i precedenti ma dello studio, pubblicato qualche settimana fa, della FESTO, già in passato oggetto di miei articoli per le loro strabilianti ricerche in ambito robotico.
Alcune dei loro studi sono poi divenuti oggetto di realizzazioni DIY da parte di maker ispirati alle ricerche pubblicate.
Un esempio è il Max Adaptive Gripper da me realizzato sulla base di lavori condivisi da un altro maker.
In questa occasione lo studio della FESTO è un pesce planario marino come le seppie ed il pesce persico del Nilo:
il robot mostrato nel video utilizza del silicone flessibile per generare un moto ondoso che gli consente di spostarsi nell’acqua.
Grazie alla comunicazione wireless il robot comunica con il mondo esterno sia per la lettura dei dati inviati dai sensori installati sul robot sia per impartirgli gli ordini necessari al movimento.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza