
Feather joy-featherwing è una shield della serie Feather della Adafruit con cui hai a disposizione un Joystick e cinque pulsanti già in configurazione joypad.
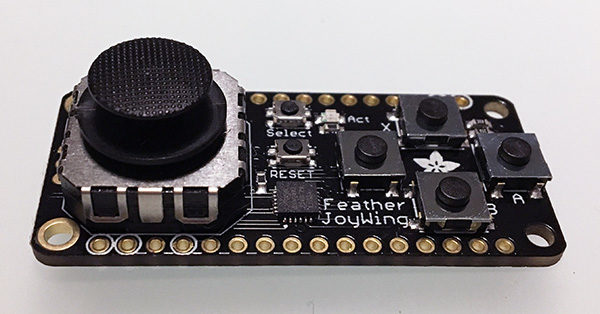
Come puoi vedere nella foto sopra la disposizione dei pulsanti a destra e del joystick a sinistra ricorda quella di molti joypad in commercio.
Configurazione della Feather joy-featherwing
Sul retro della Feather joy-featherwing trovi diverse piazzole con cui configurare la scheda:
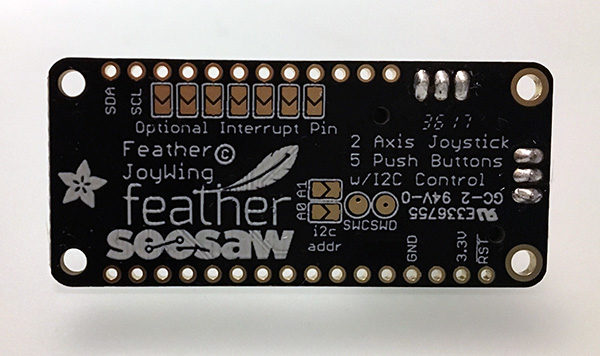
le 7 in corrispondenza dei pin di interconnessione servono a collegare i pulsanti ai pin digitali del micro controllore.
Le due piazzole orizzontali, A0 ed A1, ti permettono di configurare l’indirizzo I2C con cui comunicare con Feather joy-featherwing secondo la tabella riportata sul sito del produttore.
Ne avrai dedotto che la comunicazione tra la Feather joy-featherwing ed il microcontrollore a cui la colleghi avviene mediante due canali:
- IIC o I2C con indirizzo di defailt 0x49
- interrupt pin per i pulsanti
Nei miei esperimenti ho deciso di utilizzare il primo pin, il pin 2, per la comunicazione tra i pulsanti ed il microcontrollore:
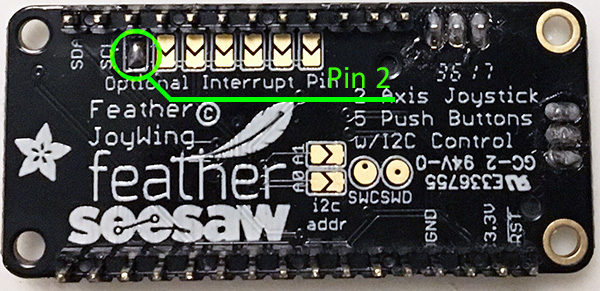
lasciando invariato l’indirizzo i2c.
Libreria Feather joy-featherwing
Per utilizzare la Feather joy-featherwing hai bisogno della libreria Adafruit seesaw che ti mette a disposizione il produttore.
Per installare la seesaw library puoi accedere, dal tuo IDE, alla sezione Gestione librerie e cercare la Adafruit seesaw:
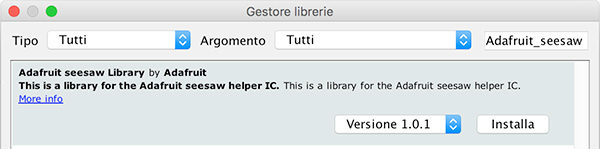 procedi quindi a cliccare sul pulsante “Installa” per avviare l’installazione della libreria nel tuo IDE.
procedi quindi a cliccare sul pulsante “Installa” per avviare l’installazione della libreria nel tuo IDE.
Al termine dell’installazione otterrai:
 e nei menu esempi dell’IDE ti compariranno gli esempi che puoi utilizzare per i primi test:
e nei menu esempi dell’IDE ti compariranno gli esempi che puoi utilizzare per i primi test:
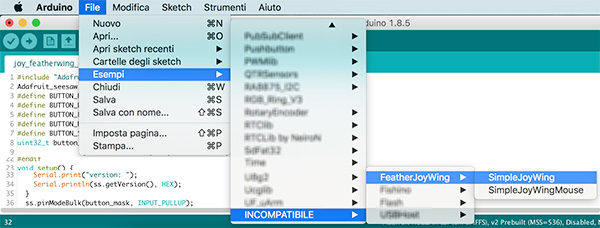
Simple Joy Wing Sketch
Il primo sketch di esempio che puoi utilizzare è il SimpleJoyWing:
#include "Adafruit_seesaw.h"
Adafruit_seesaw ss;
#define BUTTON_RIGHT 6
#define BUTTON_DOWN 7
#define BUTTON_LEFT 9
#define BUTTON_UP 10
#define BUTTON_SEL 14
uint32_t button_mask = (1 << BUTTON_RIGHT) | (1 << BUTTON_DOWN) |
(1 << BUTTON_LEFT) | (1 << BUTTON_UP) | (1 << BUTTON_SEL);
#if defined(ESP8266)
#define IRQ_PIN 2
#elif defined(ESP32)
#define IRQ_PIN 14
#elif defined(NRF52)
#define IRQ_PIN 27
#elif defined(TEENSYDUINO)
#define IRQ_PIN 8
#elif defined(ARDUINO_ARCH_WICED)
#define IRQ_PIN PC5
#else
#define IRQ_PIN 5
#endif
void setup() {
Serial.begin(115200);
while(!Serial);
if(!ss.begin(0x49)){
Serial.println("ERROR!");
while(1);
}
else{
Serial.println("seesaw started");
Serial.print("version: ");
Serial.println(ss.getVersion(), HEX);
}
ss.pinModeBulk(button_mask, INPUT_PULLUP);
ss.setGPIOInterrupts(button_mask, 1);
pinMode(IRQ_PIN, INPUT);
}
int last_x = 0, last_y = 0;
void loop() {
int x = ss.analogRead(2);
int y = ss.analogRead(3);
if ( (abs(x - last_x) > 3) || (abs(y - last_y) > 3)) {
Serial.print(x); Serial.print(", "); Serial.println(y);
last_x = x;
last_y = y;
}
if(!digitalRead(IRQ_PIN)){
uint32_t buttons = ss.digitalReadBulk(button_mask);
//Serial.println(buttons, BIN);
if (! (buttons & (1 << BUTTON_RIGHT))) {
Serial.println("Button Right pressed");
}
if (! (buttons & (1 << BUTTON_DOWN))) {
Serial.println("Button Down pressed");
}
if (! (buttons & (1 << BUTTON_LEFT))) {
Serial.println("Button Left pressed");
}
if (! (buttons & (1 << BUTTON_UP))) {
Serial.println("Button Up pressed");
}
if (! (buttons & (1 << BUTTON_SEL))) {
Serial.println("Button SEL pressed");
}
}
delay(10);
}
la prima linea include la libreria Adafruit_seesaw;
linea 02: definisci l’istanza ss della libreria seesaw di Adafruit;
linee 03-07: definisci le costanti corrispondenti ai pulsanti;
linea 08: imposta la maschera di lettura dei pulsanti eseguedo lo shift del primo bit in funzione delle costanti definite alle linee 03-07;
linee 10-22: in funzione del micro controllore con cui stai utilizzando la feather joy-featherwing imposta il pin di interrupt per la comunicazione con i pulsati come configurato a livello hardware sul retro della board;
linee 27-35: inizializza e verifica la comunicazione con il joystick sull’indirizzo 0x49, in caso di fallimento della comunicazione otterrai un messaggio sul monitor seriale. Se la comunicazione avviene correttamente, sul monotor seriale, leggi i valori di risposta della scheda;
linea 36: usa il metodo pinModeBulk a cui passi la maschera dei bottoni calcolata alla linea 08 ed il metodo INPUT_PULLUP;
linea 37: usa il metodo setGPIOInterrupts per impostare a 1 la maschera dei bottoni;
linea 38: imposta il pin 2 ( IRQ_PIN ) come INPUT;
linea 40: definisci le due variabili last_x e last_y come integer ed a valore 0;
linee 42-43: usa il metodo analogRead() della libreria Adafruit per farti restituire il valore del Joystick sugli assi X ed Y;
linee 45-49: valuta la differenza assoluta ( abs ) tra il precedente valore assunto dalla coordinata x o y ed il valore corrente, se la differenza è maggiore di 3 scrive sul monitor seriale i nuovi valori e li riassegna alle rispettive variabili last_;
linea 51: se la lettura sul pin IRQ_PIN è 0 esegue le linee dalla 52 alla 68;
linea 52: con il metodo digitalReadBulk() puoi leggere il valore che ti restituiscono i pulsanti;
linee 54-68: per ciascun pulsante scrivi sul monitor seriale quale pulsante è stato premuto.
Test del simpleJoyFeather sul monitor seriale
Il test del feather joy-featherwing sketch produce sul monitor seriale una schermata sinile alla seguente:
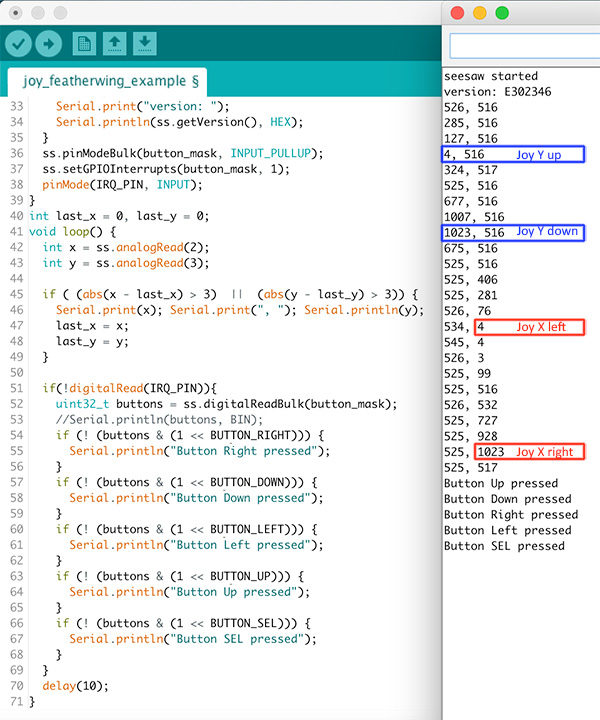
In cui il movimento del joystick sull’asse verticale passa da 0, in alto, a 1023 in basso. Il joystick orizzontale passa da 0 a sinistra fino a 1023 verso destra.
La pressione dei singoli pulsanti appare separatamente in funzione del pulsante premuto.
Ho acquistato la scheda sul sito: robotics-3d

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 ping
[…] « Feather joy-featherwing […]
[…] Feather joy-featherwing […]