
Sul sito JPL NASA il 3 settembre 2015 è stata pubblicata la news relativa all’hedgehog robot ( porcospino robot )

Si tratta, come riporta il sito, di un robot che sarà impiegato nelle esplorazioni di comete ed asteroidi, ossia in quagli ambienti in cui la gravità è molto bassa.
Si parla di micro gravità che impedirebbe ad un rover come opportunity o curiosity di rimanere a contatto con il suolo:
Hedgehog robot ha la forma di un cubo che agevola la capacità di continuare la sua esplorazione indipendentemente da quale sia il lato a contatto con il suolo:
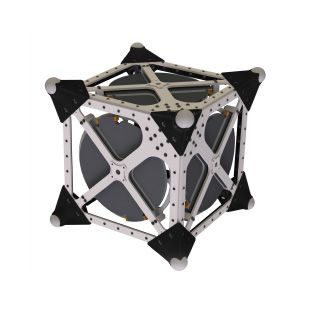
i suoi vertici sporgenti contribuiscono al suo movimento. Il sistema di propulsione è generato da 3 ruote volano interne:
che ruotando a forte velocità imprimono alla struttura esterna la capacità di ruotare sul lato desiderato, spostandosi sulla superficie dell’asteroide o della cometa.
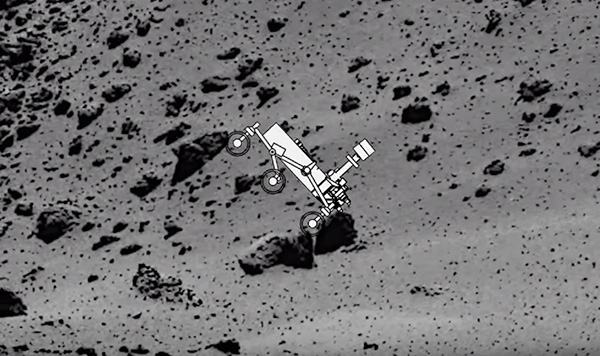
In presenza di una gravità elevata il suo movimento è lento e complesso, riesce a muoversi una faccia alla volta, tuttavia gli esperimenti a bassa gravità ( micro gravità ) hanno mostrato questo comportamento:

in cui la propulsione è molto potente.
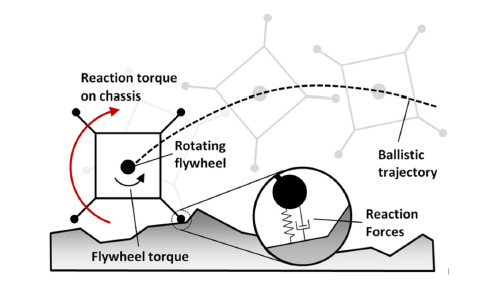
Navigando in rete ho anche trovato questa illustrazione sulla balistica del Hedgehog robot:
Come è fatto
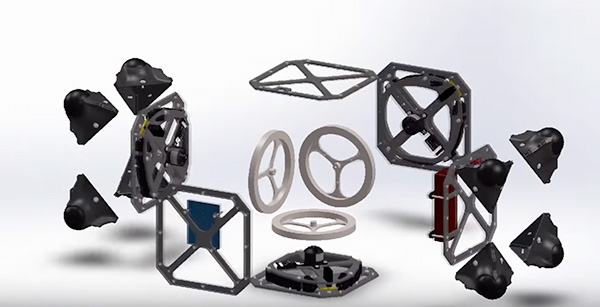
non ho trovato molte specifiche sul Hedgehog robot tuttavia sono riuscito a trovare questa immagine descrittiva su un sito che ha ripreso la notizia:
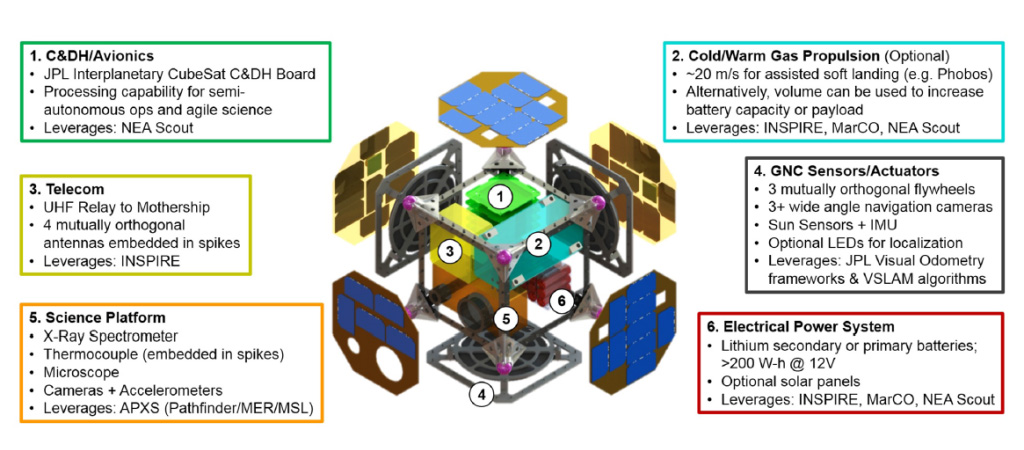
non sono certo si tratti di una immagine autentica e fedele alla costruzione.
Il video di presentazione di Hedgehog robot

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 commenti
L’interno sembra quello di Cubli, il cubo che si sposta e resta in posizione verticale sullo spigolo
https://www.youtube.com/watch?v=n_6p-1J551Y
Autore
Ciao Germano,
non lo conoscevo, davvero interesante.