
Qualche settimana fa ho acquistato micro gear motor con encoder su amazon, troverai il link nei paragrafi successivi, ed ho fatto qualche test.
In pratica si tratta di un motore molto piccolo dotato sia di una motorduzione con ingranaggi metallici sia di un encoder.
L’encoder è di tipo magnetico ( effetto hall ) a due canali: A e B sfasati di 90 gradi.
Micro gear motor con encoder
Il micro gear motor con encoder puoi acquistarlo qui tuttavia la documentazione rilasciata è esigua ed ho fatto qualche ricerca per avere più informazioni.
Dimensioni
Iniziamo dalle dimensioni in quanto sono uno dei punti di forza di questo prodotto:
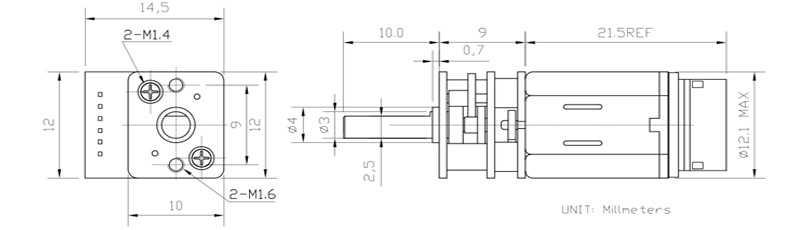
frontalmente si presenta con i sui soli 10 x 12 mm, esclusa la basetta pcb, posta sul retro, che sporge per 4,5 mm.
Si tratta di un motore che misura circa 30,5 mm ( alberino escluso ) comprensivo di encoder già montato su basetta pcb.
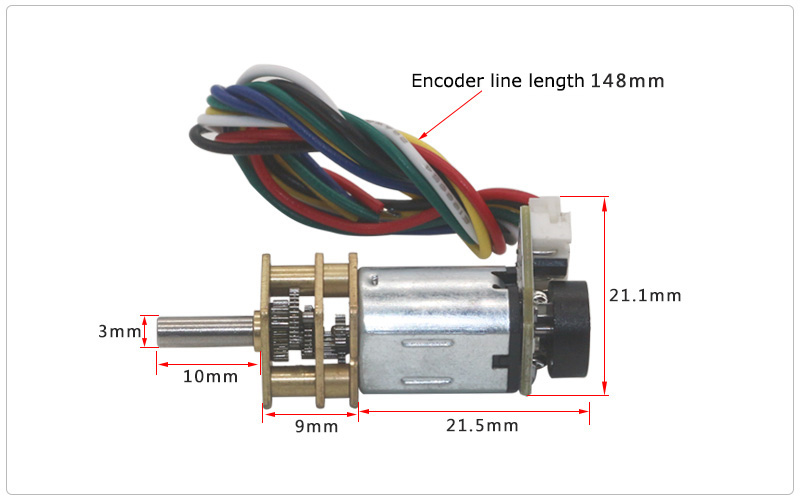
l’albero motore è di circa 10 mm di lunghezza per un diametro a “D” di 3mm, noterai che il retro è 21,1 mm e non 14,5 come nel disegno precedente, questo è dovuto alla presenza del connettore che si estende per circa 5 mm dalla fila di contatti presente sul PCB; a cui devi aggiungere circa 1,5 mm di connettore connesso ai cavi.
Solo in questo modo avrai una idea precisa dell’ingombro totale del componente.
Caratteristiche meccaniche
La caratteristica meccanica principale riguarda il rapporto di risuzione, il micro gear motor con encoder viene prodotto con diversi rapporti che dovrai scegliere in fase di acquisto:
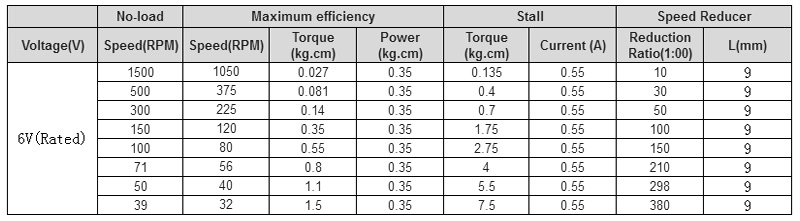
io, ad esempio ho scelto la versione da 39RPM, circa, in grado di sviluppare una copia di torsione di 1,5 Kg/cm.
Poichè il motore è sempre lo stesso e ciò che cambia sono i rapporti di riduzione, avrai capito che il rapporto coppia/velocità è inversamente proporzionale.
Avrai maggiore coppia a scapito della velocità di rotazione e viceversa.
Collegamenti. del micro gear motor con encoder
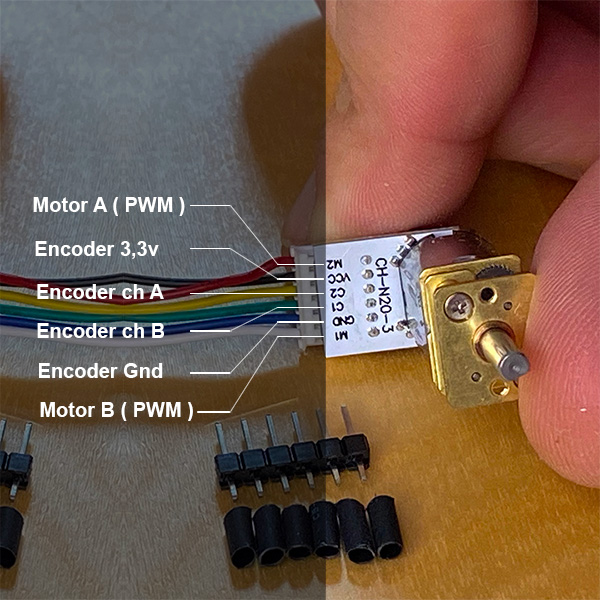
la parte relativa ai collegamenti è stata abbastanza complessa in quanto, non essendo fornita adeguata documentazione, potresti trovarti con informazioni discordanti sui collegamenti:
Ciò che ho trovato, in tutti i siti in cui si parla del micro gear motor con encoder è la raccomandazione a non invertire l’alimentazione dell’encoder in quanto non protetta da diodo, al contempo, ogni sito riporta una diversa leggenda dei collegamenti.
Armato di buona volontà ho decifrato le iscrizioni presenti sul PCB e ricavato la mia personale tabella delle connessioni.
Warning!
Non è universale, sarà necessario che tu studi il modello che hai acquistato per evitare errori o di bruciare l’encoder.
Lo schema che trovi è solo a titolo di esempio e una guida per capire meglio il significato delle connessioni presenti sul PCB dell’encoder.
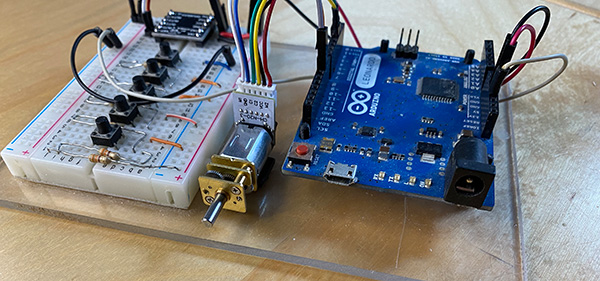
Connessione ad Arduino
In questo primo articolo vedrai solo un accenno della connessione tra il micro gear motor con encoder ed Arduino Leonardo a cui ci dedicheremo nei prossimi articoli:
Come vedi nella foro ho usato un driver per il controllo del motore, perchè sebbene alimentato a 5v funzioni egregiamente le correnti richieste potrebbero danneggiare l’arduino.
Come driver ho scelto di utilizzare un DRV8833 , già montato su breakout, che presenta alcune caratteristiche interessanti come la corrente per canale di 1,5A per canale ed una tensione per i motori fino a 10v circa:

Come detto, nei prossimi articoli, farò anche alcuni test con sketch in cui ti mostrerò come funziona e come puoi usarlo al meglio nei tuoi progetti.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza