
Microbot irrigatore elettronica segue il precedente articolo dedicato al microrobot irrigatore 3D in cui hai letto come è nato il progetto, le parti progettate in 3D con Fusion 360 ed il materiale utilizzato.
In questo secondo articolo leggerai come realizzare la parte elettronica del robot e come connetterla alla base del maqueen robot.
Materiale necessario al progetto
Per la realizzazione del progetto avrai bisogno del seguente materiale:
- n.1 pompa per aria ( https://amzn.to/3AwWusf )
- n.1 mini motor driver drv8833 ( https://amzn.to/3YRTyjn )
- n.1 dfrobot maqueen microbit robot platform ( https://www.robotics-3d.com/microbit/7169-micro-maqueen-microbit-robot-platform.html )
- n.1 micro Game pad ( https://www.robotics-3d.com/microbit/6963-microgamepad.html )
- n.2 microbit ( https://amzn.to/4ft9OfW )
- n.1 contenitore per liquidi 100 ml ( https://amzn.to/3Ai0Rrf )
- n.1 tubo in silicone diametro esterno 6 mm
- n.3 viti M3x16 mm testa a brugola;
- n.4 viti M3x10 mm in plastica;
- n. 2 dadi in platica M3;
- n.4 viti M2x10 mm
- n.2 rondelle per M2;
- n.2 distanziali in plastica M3x30 mm;
ed in particolare per la parte elettronica ti occorreranno i primi cinque punti.
Funzionamento della pompa
Come sai i microcontrollori non possiedono potenza sufficiente a innescare una pompa ed anche se come voltaggio sono in grado di attivarla è necessario interporre un driver di controllo.
In questo progetto ho scelto di utilizzare il drv8833 un driver molto piccolo per dimensione ma di potenza adeguata al controllo della pompa utilizzata.
Il drv8833 controlla motori da 3v a 10v con una corrente fino a 1,5 A, il suo utilizzo è perfetto per questa applicazione con la pompa ad aria:

scelta, che funziona a 6v e 300mA a vuoto.
Dopo aver realizzato il case puoi applicare il drv8833 direttamente al case con l’aiuto della colla a caldo, come mostrato in figura:
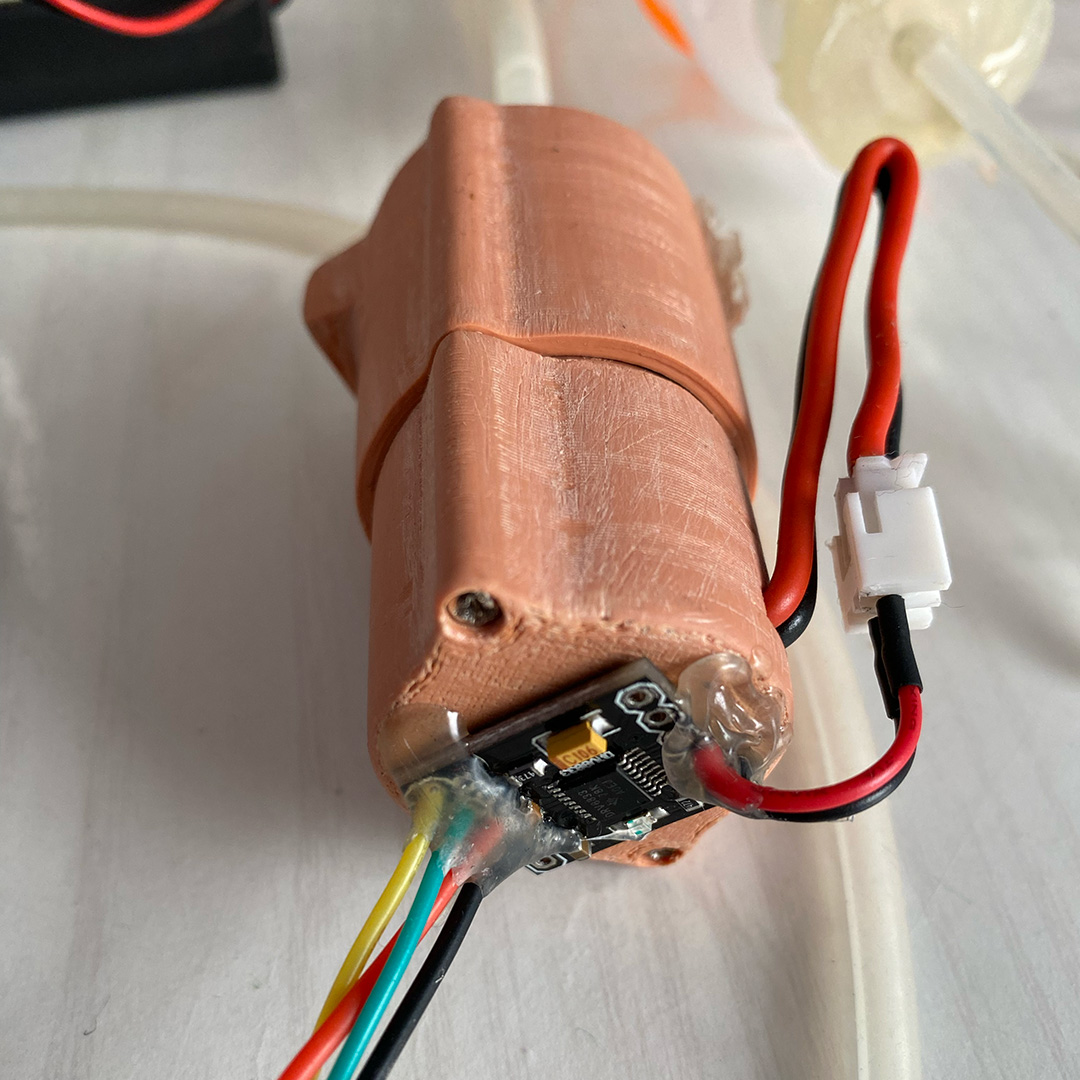
la colla a caldo protegge anche i contatti da eventuali perdite di acqua o schizzi che possano arrivarci accidentalmente sopra.
Dal drive usciranno da un lato i due fili ( positivo e negativo ) a cui collegare la pompa e dall’altro i 4 fili per il controllo:
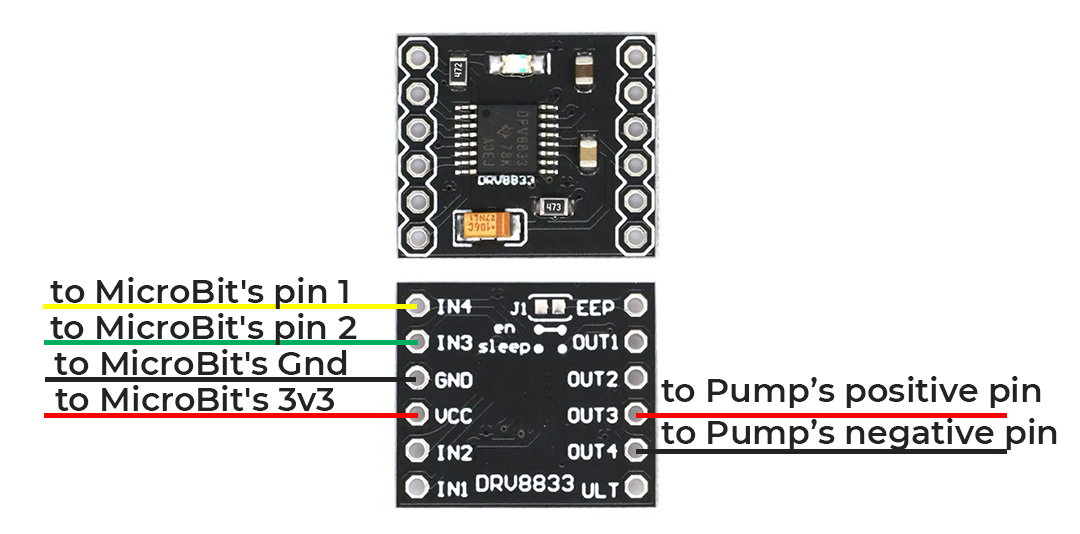
e dall’altro i due da collegare alla pompa.
Puoi osservare il dettaglio delle connessioni lato MicroBit in questa immagine.
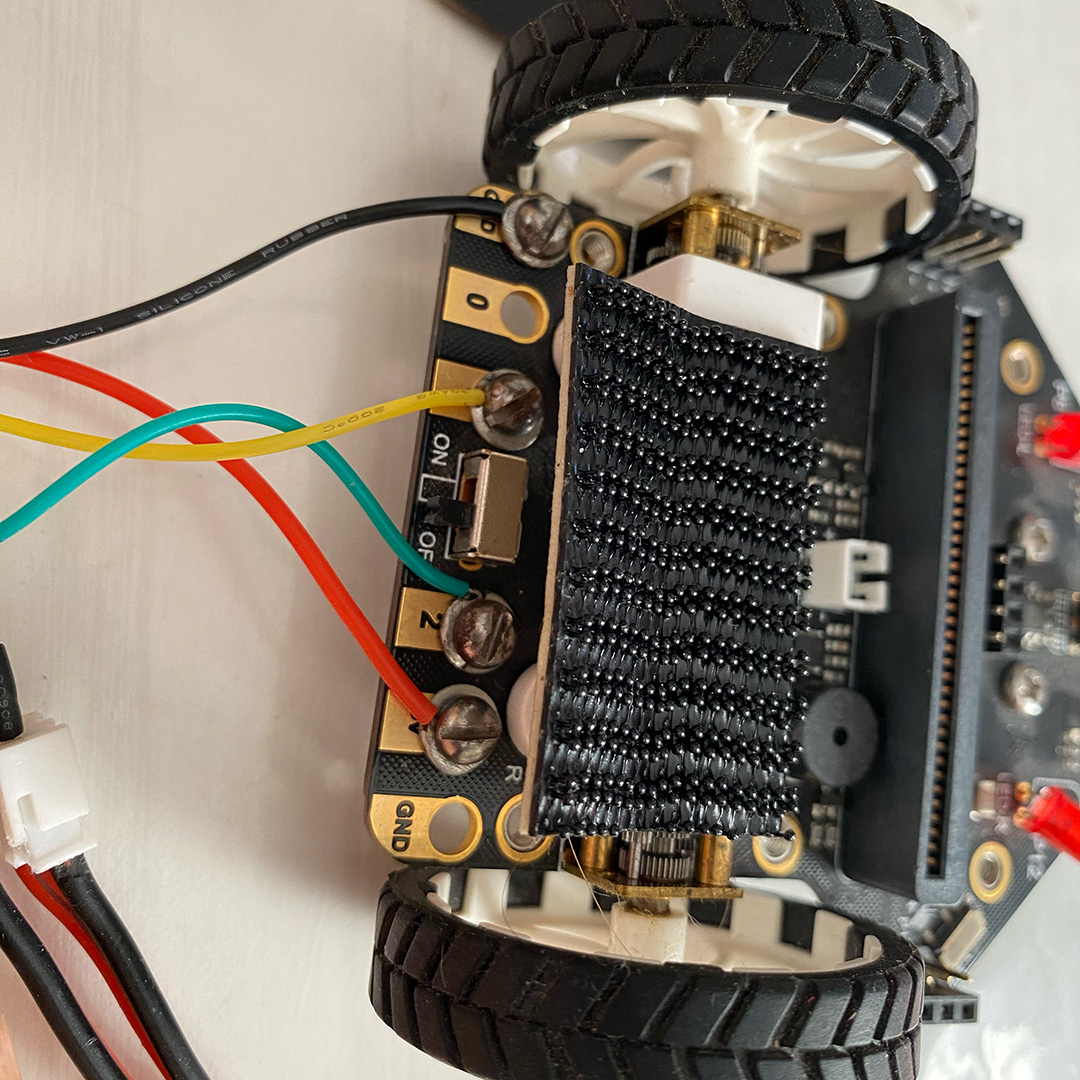
Il resto dei collegamenti del bicrobot irrigatore elettronica è obligato e non richiede approfondimenti specifici.
Dovrai inserire il porta batterie in dotazione nella posizione che desideri e la scheda microbit nel suo slot predispoto.
Collegare l’alimentazione ed ultimare l’assemblaggio delle parti stampate in 3D come descritto nel precedente articolo.
Microbot irrigatore elettronica
Il microbot irrigatore elettronica, una volta ultimato, si presenta così:
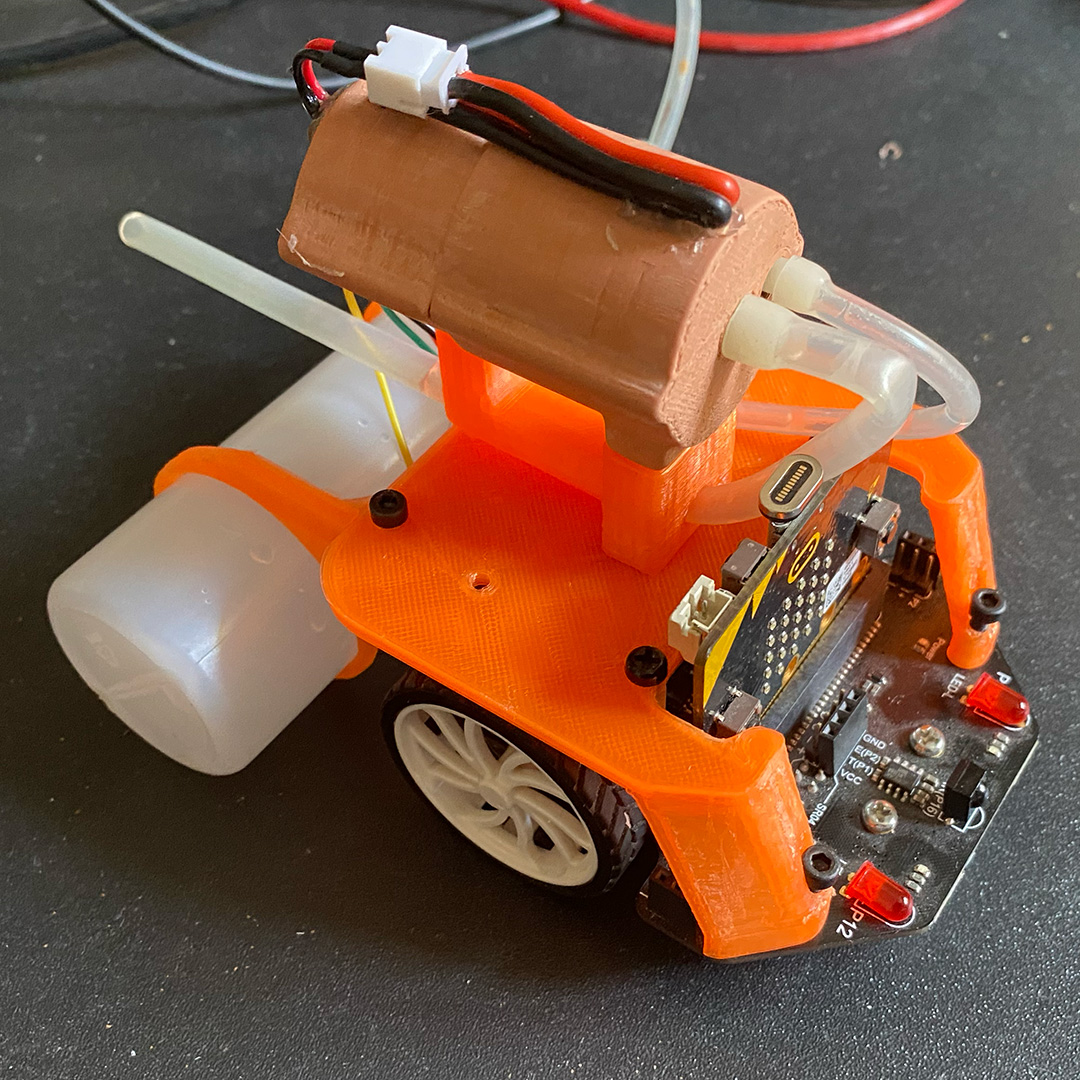
la pompa dispone di due tubi:
- uno di ingresso per l’acqua che preleva dal serbatoio;
- uno di uscita che sporge dal retro per irrigare;
Future evoluzioni
Sto valutando di apportare una piccola modifica al progetto: riguardante la parte di gestione dell’acqua.
Poichè la pompa è una pompa ad aria, sebbene funzioni senza problemi con l’acqua, potresti modificare il flusso ossia mettere un solo tubo che dalla pompa va al serbatoio;
al serbatoio arriverebbero 2 tubi:
- uno di ingresso proveninete dalla pompa;
- uno di uscita per irrigare;
In questo modo la pompa lavorerebbe solo ad aria, aspirandola dal foro rimasto libero e spingendola nel serbatoio attraverso il tubo di uscita.
Lasceresti che sia l’aria in ingresso nel serbatoio a creare la pressione all’interno di quest’ultimo che farebbe fuoriuscire il liquido presente dal secondo tubo, irrigando.
In questo modo eviteresti che del liquidi passi sui circuiti e che una pedita possa danneggiare il microbot irrigatore.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza