
Mercoledì 12 novembre 2014: l’evento del giorno è stato lo sbarco del lander Philae sulla cometa 67P per i non astronomi è Churyumov-Gerasimenko.

E Rosetta?
Rosetta e la sonda che ha viaggiato 10 anni, dal 5 marzo del 2004, raggiungendo un importantissimo traguardo scientifico operato dall’ESA ( Agenzia Spaziale Europea ).
Alle 17.03, ora italiana, sono arrivate le immagini del lander Philae atterrato sulla superficie della cometa. L’atterraggio è avvenuto alle 16.35 circa, ora italiana, tuttavia il segnale trasmesso impiega 28 minuti e 34 seocndi per compiere il suo viaggio di 511 milioni di Km, a tale distanza dalla terra si trova in questo momento la cometa 67P Churyumov-Gerasimenko.
La notizia è straordinaria ma come blog di robotica il mio interesse e attirato dal lander stesso con il suo equipaggiamento.
Come è fatto Philae?
Il lander Philae era stato progettato per viaggiare legato alla sonda rosetta:

e sganciarsi dalla sonda al momento dell’accometaggio, avvenuto mercoledì.
Su Wikipedia ho trovato la descrizione del sistema di ancoraggio che era stato previsto per l’accometaggio:
Ogni arpione è costituito da un proiettile in rame–berillio, un sistema di espulsione pirotecnico, un rocchetto di cavo e un sistema di riavvolgimento del cavo basato su un motore brushless. Il lancio del primo arpione è comandato automaticamente al rilevamento del contatto di una delle tre zampe con il suolo: il proiettile viene espulso a una velocità di 90 m/s (324 km/h) da un meccanismo a gas compresso a 300 bar, che permette fino a 10 000 g di accelerazione; lo sparo ha una durata di 1,5 ms e il pistone una corsa di 50 mm; subito dopo viene attivato il meccanismo di riavvolgimento per serrare la sonda alla cometa, richiamando il proiettile a sé alla velocità di 0,32 m/s (1,1 km/h). La forza esercitata dal meccanismo di ritenuta è regolabile su 8 step tra 1 e 30 N.
In caso il primo arpione fallisca, viene lanciato un secondo arpione. L’arpione ha a disposizione 2,5 metri di cavo; se per qualche motivo non dovesse fare presa entro questa distanza, un apposito meccanismo provvede a dissipare l’energia cinetica in eccesso senza danneggiare il lander.
noti subito che il sistema di ancoraggio che era stato previsto è complesso e studiato per avere a disposizione più chance per portare a buon fine l’operazione e permettere a Philae di rimanere saldamente ancorata alla cometa 67P Churyumov-Gerasimenko.
Tuttavia l’altro ieri gli arpioni si sono correttamente armati in fase di avvicinamento del lander alla cometa ma non si sono attivati lasciando che l’unico sistema che attualmente la ancora alla cometa è costituito dalle viti di ancoraggio:

fortunatamente la superficie della cometa è costituita da materiale meno resistente alla perforazione di quello previsto il che consente un ancoraggio alquanto solido.
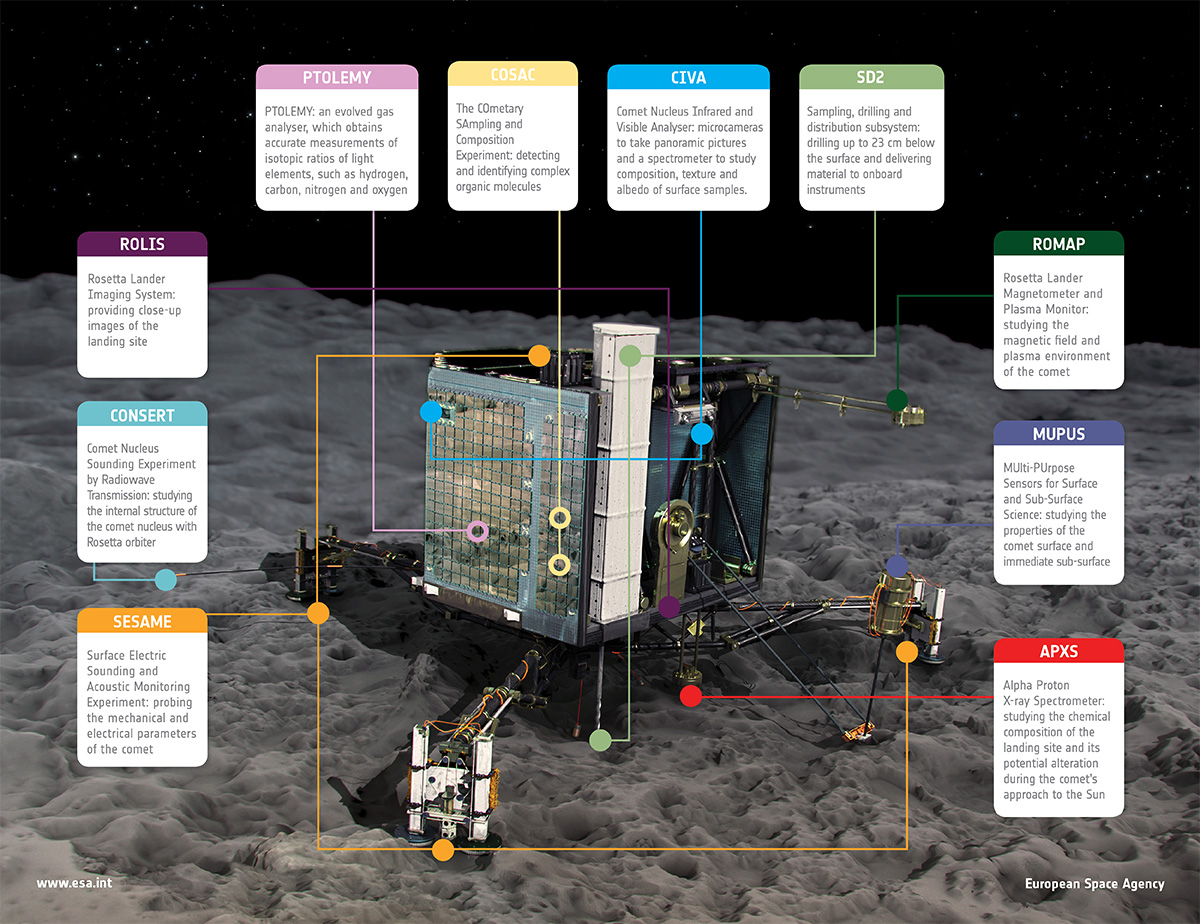
I sensori di philae
Sul lander sganciato da rosetta sono stati predisposti dei sensori necessari a raccogliere dati sulla cometa a cui è ancorata e permettere agli scenziati di compiere progressi incredibili nello studio delle comete.
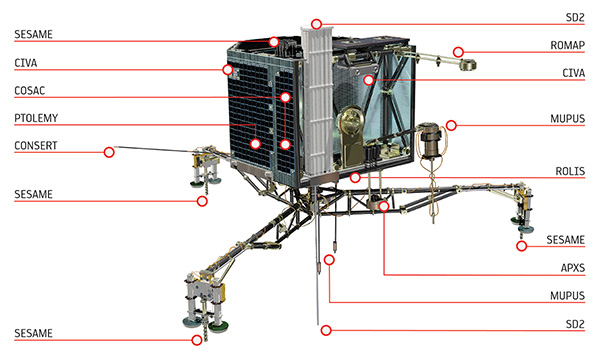
L’elenco completo dei sensori lo trovi su questa pagina di wikipedia. L’ESA ha rilasciato una immagine che mostra la loro disposizione su Philae:
L’ESA ha rilasciato anche un’immagine non fotografica del lander:
Com’è fatta Rosetta
Non dimenticare che chi ha portato philae alla sua destinazione è stata la sonda Rosetta a cui philae è stata legata fino a mercoledì mattina e che si è presa cura non solo del lander ma di fotografare per mesi la superficie della cometa alla ricerca di un punto favorevole all’atterraggio del lander.
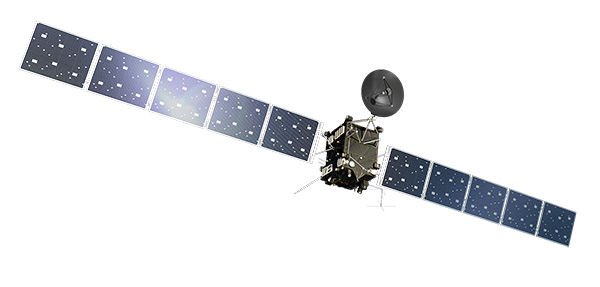
anche rosetta è dotata di numerosi strumenti:
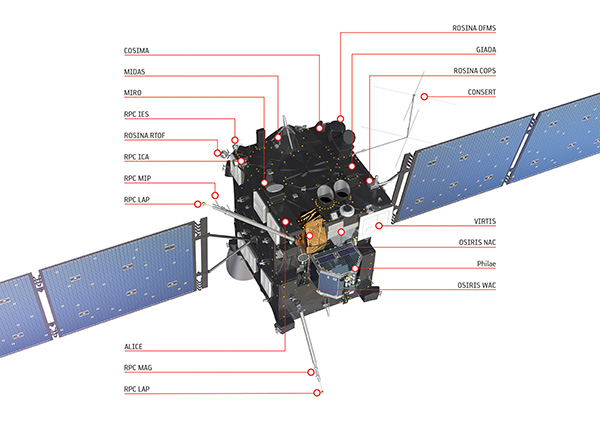
descritti sul sito dell’ESA:
- ALICE – Ultraviolet Imaging Spectrometer (S. A. Stern, USA)
- CONSERT – Comet Nucleus Sounding (W. Kofman, France)
- COSIMA – Cometary Secondary Ion Mass Spectrometer (J. Kissel, Germany)
- GIADA – Grain Impact Analyser and Dust Accumulator (L Colangeli, Italy)
- MIDAS – Micro-Imaging Analysis System (W. Riedler, Austria)
- MIRO – Microwave Instrument for the Rosetta Orbiter (S. Gulkis, USA)
- OSIRIS – Rosetta Orbiter Imaging System (H.U. Keller, Germany)
- ROSINA – Rosetta Orbiter Spectrometer for Ion and Neutral Analysis (H. Balsiger, Switzerland)
- RPC – Rosetta Plasma Consortium (R. Boström, Sweden; J. Burch, USA; K-H Glassmeier, Germany; R. Lundin, Sweden; J. G. Trotignon, France; A. Balogh, UK)
- RSI – Radio Science Investigation (M. Pätzold, Germany) VIRTIS – Visible and Infrared Mapping Spectrometer (A. Coradini, Italy)
Nel 2011 la sonda si è ibernata per risparmiare energia fino al suo risveglio il 20 gennaio del 2014 in cui ci sono stati momenti di brivido e preoccupazione nell’attesa dei primi segnali da parte della sonda che annunciava a terra il suo risveglio, Paolo Ferri, a capo del dipartimento che cura la missione ha poi commentato quei momenti con ironia:
“Dovevamo anche dire alla gente di non preoccuparsi, mentre noi eravamo preoccupati, ovviamente, ma dicevamo che tutto era sotto controllo.”
Anche Google ha reso omaggio a questa grande scoperta e ieri se ti sei collegato all’homepage del motore di ricerca avrai notato campeggiare questa immagine:

Grazie ESA e grazie a tutti coloro che hanno reso possibile la realizzazione di questa esperienza.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza