
Robot arm 3D printed openscad è il secondo articolo dedicato alla realizzazione di un cobot o co-robot.
Puoi leggere l’articolo introduttivo, con la descrizione di cosa intendo come cobot qui.
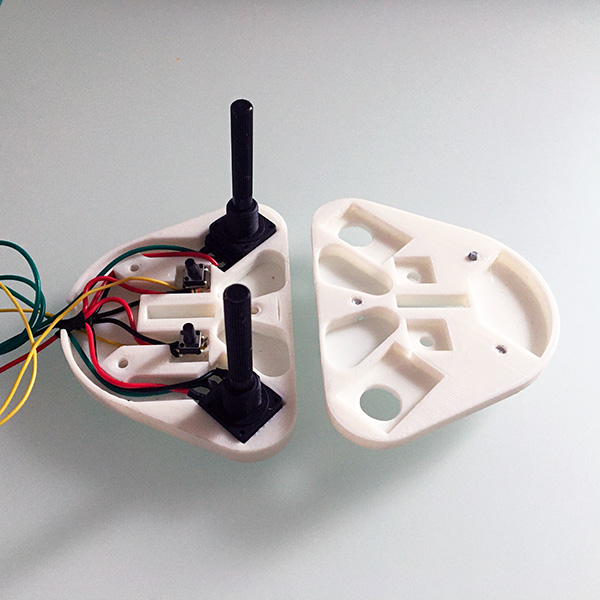
Come hai letto ho voluto modificare la base del controller per poter utilizzare dei componenti che già erano a mia disposizione.
Come vedi nella foto i componenti sono perfettamente alloggiati nelle rispettive sedi.
Ho condiviso il progetto modificato su thingiverse da cui puoi scaricare i files.
Robot arm 3D printed openscad
Partendo dalla base scaricata dal sito del progetto originale:
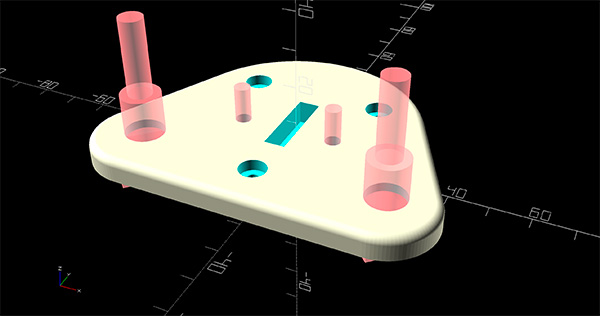
l’ho adattata alle mie necessità disegnandola con le medesime proporzioni in openscad:
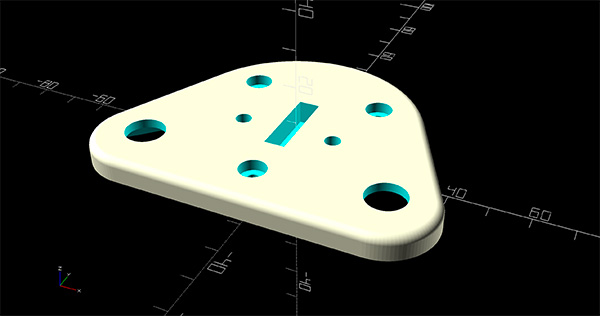
 e, di conseguenza, ho preferito riprogettare anche la parte superiore della base in modo che coincidessero:
e, di conseguenza, ho preferito riprogettare anche la parte superiore della base in modo che coincidessero:
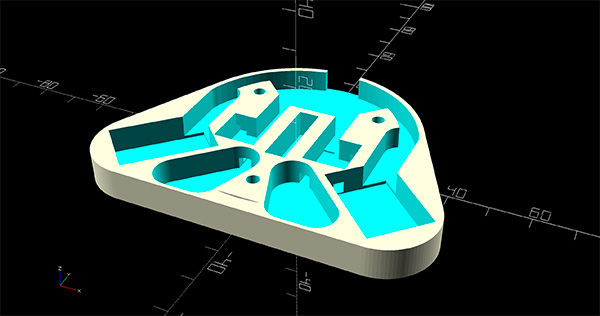
I componenti a mia disposizione li ho ridisegnati in openscad per poterli sottrarre dalle parti piene della base: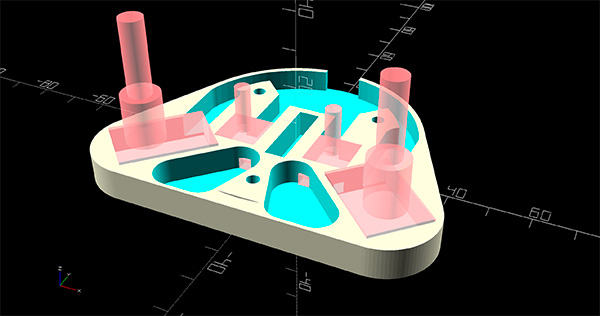
e della parte superiore:
arrivando ad ottenere un risultato complessivo simile al seguente:

nella fase di disegno/progettazione della nuova console di controllo del robot arm 3D printed openscad.
Il codice del modello
Utilizzando un prodotto come openSCAD, modellazione 3D via codice opensource, è facile trasferire il modello disegnato semplicemente passando il codice:
base();
top();
section=false;
/* BASE */
module base() {
difference() {
hull() {
translate([0,0,4]) cylinder(r=32,h=8,center=true,$fn=96);
translate([31,-21,4]) cylinder(r=13,h=8,center=true,$fn=96);
translate([-31,-21,4]) cylinder(r=13,h=8,center=true,$fn=96);
}
translate([31,-20,5]) rotate([0,0,45]) pot();
translate([-31,-20,5]) rotate([0,0,-45]) pot();
translate([12,-5,5.1]) pushButton();
translate([-12,-5,5.1]) pushButton();
translate([0,-2,5]) cube([5.2,20.2,8],center=true);
/* SCREEW */
translate([17,13,5.1]) cylinder(r=1.6,h=12,center=true,$fn=96);
translate([-17,13,5.1]) cylinder(r=1.6,h=12,center=true,$fn=96);
translate([0,-23,5.1]) cylinder(r=1.6,h=12,center=true,$fn=96);
/* NUTS */
translate([17,13,1.2]) cylinder(r=3.4,h=2.5,center=true,$fn=6);
translate([-17,13,1.2]) cylinder(r=3.4,h=2.5,center=true,$fn=6);
translate([0,-23,1.2]) cylinder(r=3.4,h=2.5,center=true,$fn=6);
/* incisioni */
hull() {
translate([25,8,5.1]) cylinder(r=4.2,h=6,center=true,$fn=96);
translate([25,-8,5.1]) cylinder(r=4,h=6,center=true,$fn=96);
}
hull() {
translate([-25,8,5.1]) cylinder(r=4.2,h=6,center=true,$fn=96);
translate([-25,-8,5.1]) cylinder(r=4,h=6,center=true,$fn=96);
}
difference() {
translate([0,0,5.1]) cylinder(r=30.5,h=6,center=true,$fn=96);
translate([0,0,5.1]) cylinder(r=26,h=6.1,center=true,$fn=96);
translate([0,-10,5.1]) cube([80,40,6],center=true);
}
translate([9,7,5.1]) cube([5,20.2,6],center=true); // wire out
translate([-9,7,5.1]) cube([5,20.2,6],center=true); // wire out
translate([0,25,5.1]) cube([10,20.2,6],center=true); // wire out
/* scavi */
hull() {
translate([7,-17,5.1]) cylinder(r=5,h=7,center=true,$fn=96);
translate([18,-28,5.1]) cylinder(r=5,h=7,center=true,$fn=96);
translate([11,-28,5.1]) cylinder(r=5,h=7,center=true,$fn=96);
}
hull() {
translate([-7,-17,5.1]) cylinder(r=5,h=7,center=true,$fn=96);
translate([-18,-28,5.1]) cylinder(r=5,h=7,center=true,$fn=96);
translate([-11,-28,5.1]) cylinder(r=5,h=7,center=true,$fn=96);
}
difference() {
translate([0,0,5.1]) cylinder(r=30,h=6,center=true,$fn=96);
translate([16,-10,5.1]) rotate([0,0,45]) cube([60,40,6],center=true);
translate([-16,-10,5.1]) rotate([0,0,-45]) cube([60,40,6],center=true);
translate([0,-10,5.1]) cube([60,40,6],center=true);
}
if(section) translate([10,-50,-15]) cube([100,100,30]);
}
}
/* TOP */
module top() {
difference() {
union() {
minkowski() {
hull() {
translate([0,0,9]) cylinder(r=30,h=.1,center=true,$fn=96);
translate([31,-21,9]) cylinder(r=11,h=.1,center=true,$fn=96);
translate([-31,-21,9]) cylinder(r=11,h=.1,center=true,$fn=96);
}
sphere(2,$fn=96);
}
/* */
hull() {
translate([0,0,7]) cylinder(r=32,h=4,center=true,$fn=96);
translate([31,-21,7]) cylinder(r=13,h=4,center=true,$fn=96);
translate([-31,-21,7]) cylinder(r=13,h=4,center=true,$fn=96);
}
/* */
}
translate([31,-20,5]) rotate([0,0,45]) pot();
translate([-31,-20,5]) rotate([0,0,-45]) pot();
translate([12,-5,5.1]) pushButton();
translate([-12,-5,5.1]) pushButton();
translate([0,-2,9]) cube([5.2,20.2,8],center=true);
/* HEAD SCREEW */
translate([17,13,9.7]) cylinder(r=3.4,h=3,center=true,$fn=96);
translate([-17,13,9.7]) cylinder(r=3.4,h=3,center=true,$fn=96);
translate([0,-23,9.7]) cylinder(r=3.4,h=3,center=true,$fn=96);
/* SCREEW */
translate([17,13,8.1]) cylinder(r=1.6,h=12,center=true,$fn=96);
translate([-17,13,8.1]) cylinder(r=1.6,h=12,center=true,$fn=96);
translate([0,-23,8.1]) cylinder(r=1.6,h=12,center=true,$fn=96);
hull() {
translate([7,-17,6.5]) cylinder(r=5,h=7,center=true,$fn=96);
translate([18,-28,6.5]) cylinder(r=5,h=7,center=true,$fn=96);
translate([11,-28,6.5]) cylinder(r=5,h=7,center=true,$fn=96);
}
hull() {
translate([-7,-17,6.5]) cylinder(r=5,h=7,center=true,$fn=96);
translate([-18,-28,6.5]) cylinder(r=5,h=7,center=true,$fn=96);
translate([-11,-28,6.5]) cylinder(r=5,h=7,center=true,$fn=96);
}
difference() {
translate([0,0,6.5]) cylinder(r=30,h=6,center=true,$fn=96);
translate([16,-10,6.5]) rotate([0,0,45]) cube([60,40,6],center=true);
translate([-16,-10,6.5]) rotate([0,0,-45]) cube([60,40,6],center=true);
translate([0,-10,6.5]) cube([60,40,6],center=true);
}
if(section) translate([10,-50,-15]) cube([100,100,30]);
}
}
module pot() {
translate([0,4,0])cube([16,24,7.5],center=true);
translate([0,0,10]) cylinder(r=5,h=13,center=true,$fn=96);
translate([0,0,20]) cylinder(r=3,h=32,center=true,$fn=96);
}
module pushButton() {
cube([11,11,6],center=true);
translate([0,0,7.5]) cylinder(r=2,h=15,center=true,$fn=96);
translate([4,4.75,-2]) rotate([90,0,0]) cube([3,3,6],center=true);
translate([-4,4.75,-2]) rotate([90,0,0]) cube([3,3,6],center=true);
translate([4,-4.75,-2]) rotate([90,0,0]) cube([3,3,6],center=true);
translate([-4,-4.75,-2]) rotate([90,0,0]) cube([3,3,6],center=true);
}
che puoi modificare per adattarlo ai tuoi componenti o per dargli una forma che reputi più adatta al tuo progetto.
I componenti del controller
Oltre a riprogettare la base del controller per il robot arm 3D printed openscad ho adattato anche altre parti per renderle compatibili con i componenti a mia disposizione.
In particolare ho modificato le parti che includono dei potenziometri come la spalla ( epaule nel progetto ):

che nella mia versione presenta una scanalatura circolare per alloggiarvi un potenziometro circolare da 10Kohm come questo:

il cui foro per la leva è di tipo esagonale e l’ingombro è di circa 12mm di diametro.
Il risultato in openScad è il seguente:
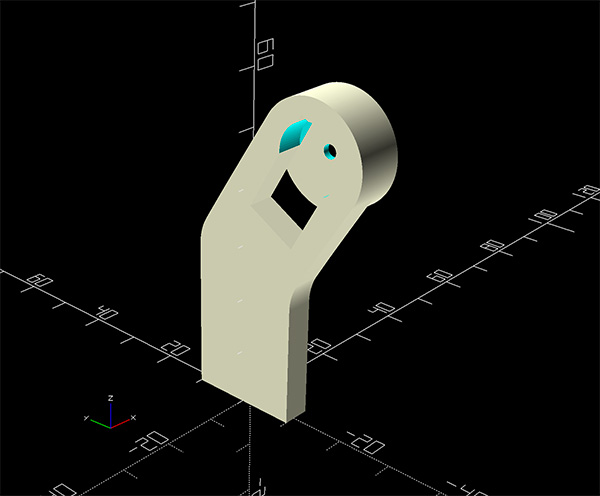
in cui vedi chiaramente l’incavo circolare per alloggiare il potenziometro.
Il codice per la realizzazione di questo componente parte dal modello stl originale a cui ho solo praticato l’incavo ed un foro per il riferimento in fase di montaggio.
Ecco il codice che puoi utilizzare:
$fn=90;
difference() {
translate([350,-80,-158]) import("Ctrl_Epaule.stl");
translate([0,-13.45,48.75])rotate([0,90,0]) cylinder(r=6,h=5,center=true);
translate([0,-13.45,48.75])rotate([0,90,0]) cylinder(r=1.2,h=15,center=true);
}
per generare il tuo componente definitivo:
Il braccio del controller
Il braccio che collega la “spalla” al “polso” del controller presenta un incastro destinato ad alloggiare un altro potenziometro, nel mio esempio, circolare:
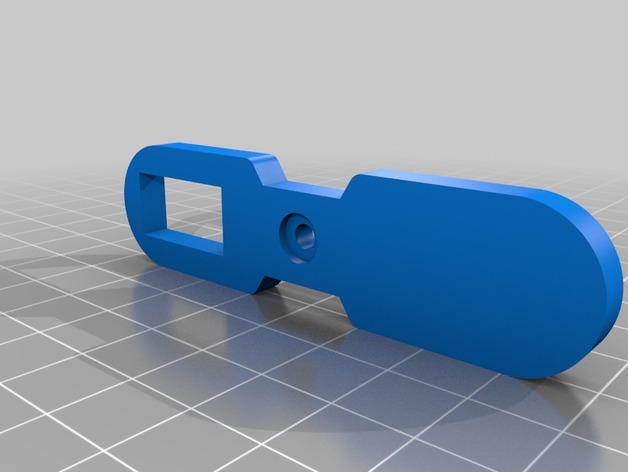
per cui ho dovuto modificarlo per renderlo adatto al mio scopo:
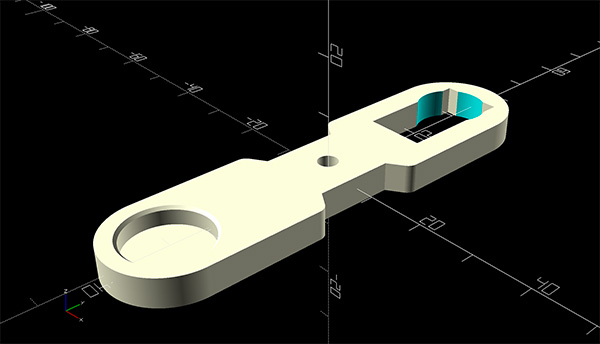
prima di poterlo stampare.
Il codice che puoi utilizzare è il seguente:
$fn=90;
difference() {
rotate([0,-90,0]) translate([395.5,-97,-207]) import("Ctrl_Bras.stl");
translate([0,29.5,0])cylinder(r=6,h=7,center=true);
}
Infine ho voluto disegnare la manopola del potenziometro, ossia la parte che presenta il perno da inserire nel potenziometro e che ne determina la rotazione in funzione del movimento.
Asse del potenziometro
L’asse del potenziometro, in questo esempio del robot arm 3D printed openscad, non è inteso come esclusivamente l’asse in se ma presenta anche la parte stampata in 3D che sarà fissata al braccio ed al polso:
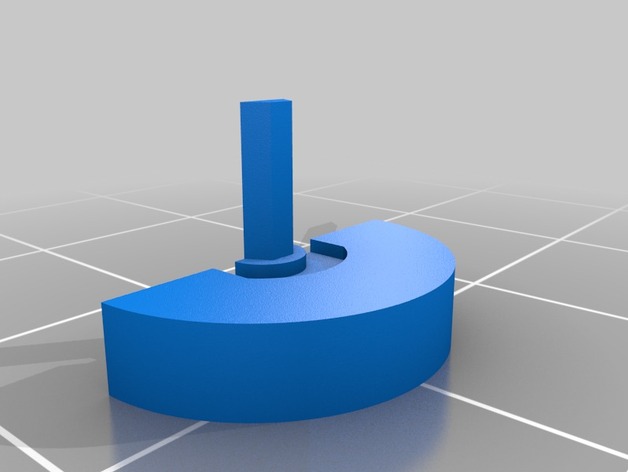
nel modello originale la forma era quella mostrata nella figura sopra, le mie modifiche hanno portato alla realizzazione di una leva del potenziometro composta in due parti:
quella 3D disegnata sulla base di quella fornita;
l’asse esagonale vero e proprio che ho ottenuto tagliando un chiavino esagonale;
Il modello 3D è il seguente:
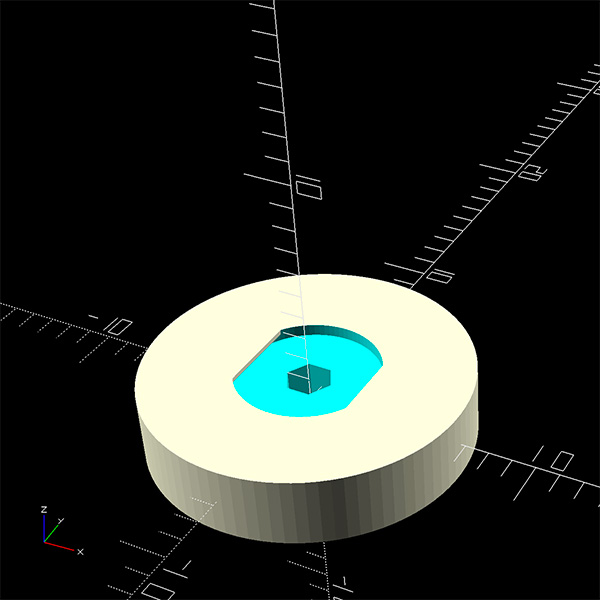
e devi ultimarlo inserendovi l’asse esagonale tagliato a circa 1cm di lunghezza.
Il codice per la realizzazione della manopola o leva del potenziometro è:
difference() {
cylinder(r=6.8,h=3, center=true,$fn=90);
difference() {
translate([0,0,1.3]) cylinder(r=3,h=.6, center=true,$fn=90);
translate([2.6,-10,1.3]) cube([10,20,1]);
translate([-12.4,-10,1.3]) cube([10,20,1]);
}
cylinder(r=1,h=8, center=true,$fn=6);
}
ed il risultato finale dovrebbe risultarti simile al seguente:
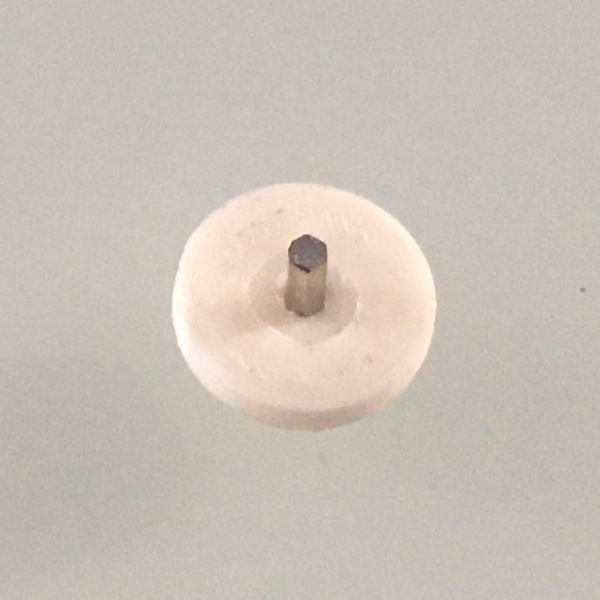
Ora sei pronto per assemblare il robot arm 3D printed openscad ed il suo controller e procedere con la programmazione.
Nei prossimi articoli ci occuperemo di questi aspetti.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza