
Robot arm montaggio ti mostra come eseguire il montaggio della parte in movimento del braccio robot.
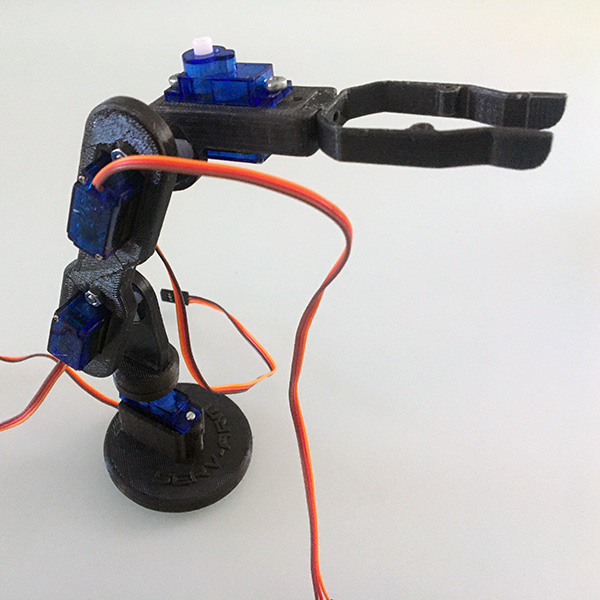
Il risultato finale del montaggio è quello mostrato nella figura sopra in cui vedi tutte le parti assemblate.
Come per i precedenti articoli ti ricordo che il progetto è pubblicato a fasi distinte che puoi leggere seguendo i link:
e che il progetto originale è scaricabile da thingiverse a questo link, mentre la mia versione la trovi qui.
Procediamo con ordine e vediamo le vari fasi partendo dalla stampa 3D di tutti i componenti.
Stampa 3D del Robot arm montaggio
Le parti stampate in 3D del robot arm montaggio sono le seguenti:
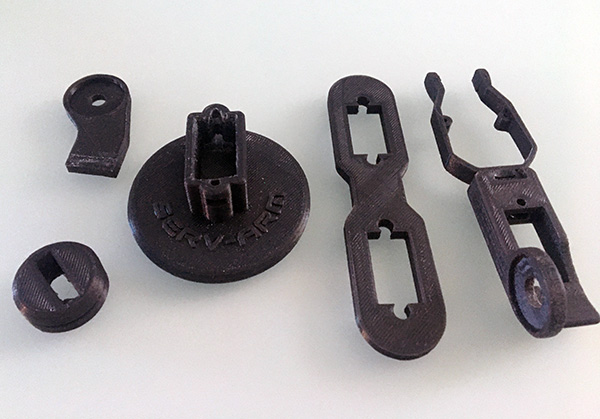
partendo da sinistra:
- la spalla con relativo supporto circolare per il servo;
- la base;
- il braccio;
- il polso con la mano ( pinza ) annessa;
- la pinza;
oltre alle parti in 3D ti servono i 4 servomotori ( micro servo ) per fornire il coBot di movimenti:
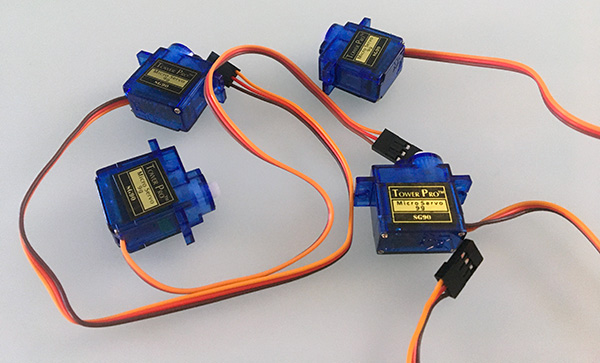
ciascun servo deve essere avvitato alla sua sede ed il relativo supporto a stella incollato alla parte 3D che vuoi far muovere.
Montaggio delle parti mobili dei servo
Le parti che si muoveranno di ciascun servo sono solitamente fornite con i servo stessi e si montano sugli alberini mediante vite di fissaggio.
Hanno forme differenti ( stella, braccio singolo, braccio dioppio, rondella ) io ho scelto quelle a stella, o croce.
Puoi adattare le dimensioni delle leve tagliandole leggermente alle estremità per renderle compatibili con le parti 3D in cui devono essere montate:
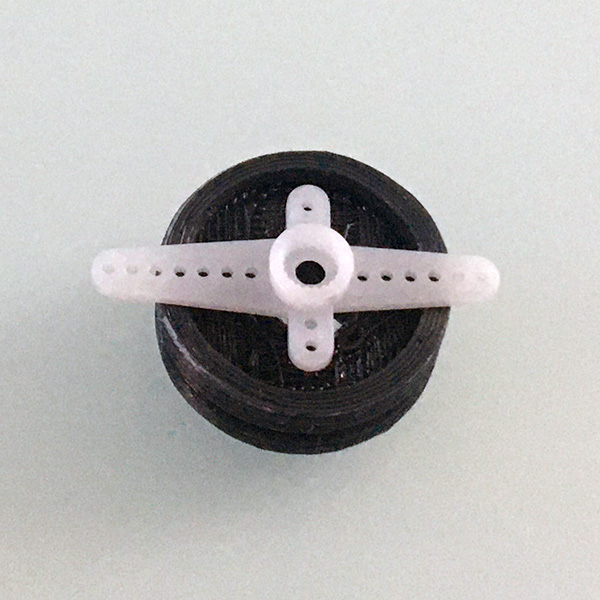
nell’esempio sopra puoi accorciare le due estremità più lunghe per adattarle:
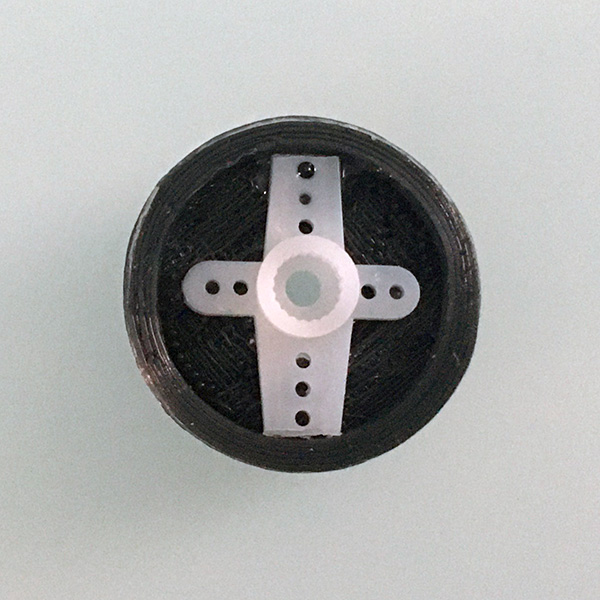
ed utilizzare della colla per fermarla.
Video del robot arm montaggio
Nel video del robot arm montaggio vedi tutte le fasi della realizzazione del braccio completamente montato:
Come hai notato, oltre ad essere stato notevolmente accelerato, il video parte dal supporto per la spalla ed arriva al completamento in meno di 15 min usando della colla cianoacrilica.
Nei prossimi articoli vedrai la parte relativa al codice di test ed alle evoluzioni possibili.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza