
Analizziamo insieme a Gabriele l’elettronica del suo progetto: Robot hand XBee elettronica.
Puoi leggere la prima parte del progetto con le motivazioni ed il principio di funzionamento in questo articolo.
Robot hand XBee elettronica
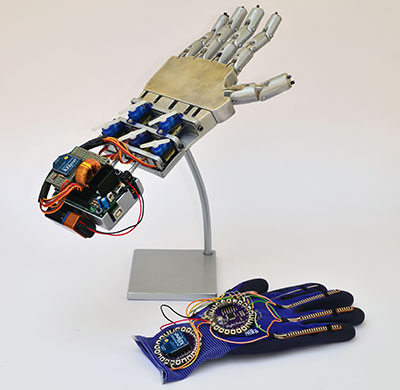
i componenti elettronici e le shield usate da Gabriele sono riportate nel primo articolo ed in questa foto del robot hand xbee elettronica:
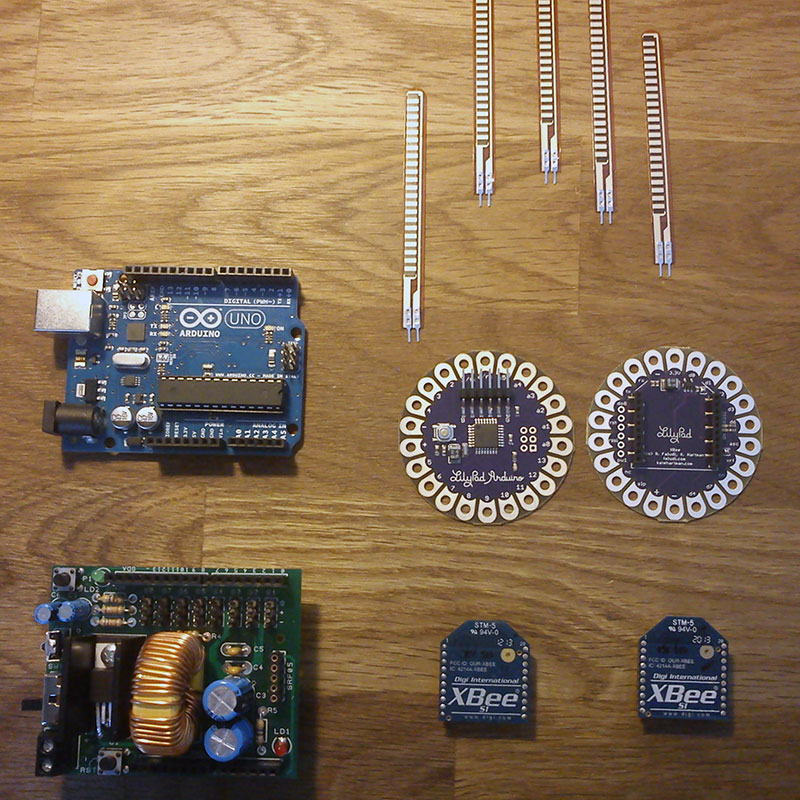
In cui trovi:
- n.1 arduino uno
- n.1 robot shield (leggi in seguito il suo scopo)
- n.1 lilipad
- n.1 adattatore xbee lilipad
- n.5 sensori di flessione
- n.2 moduli xbee
Gabriele scrive:
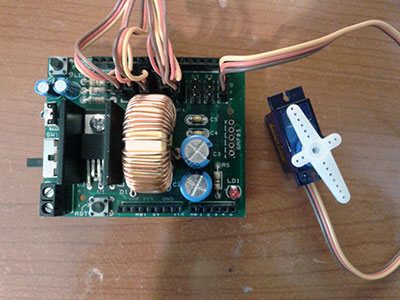
La prima è la “Robot_Shield” di Futura elettronica, una shield comprendente un circuito con regolatore switching per un adattamento della tensione e migliorare le prestazioni della batteria, e 8 pin strip per il collegamento dei servomotori.

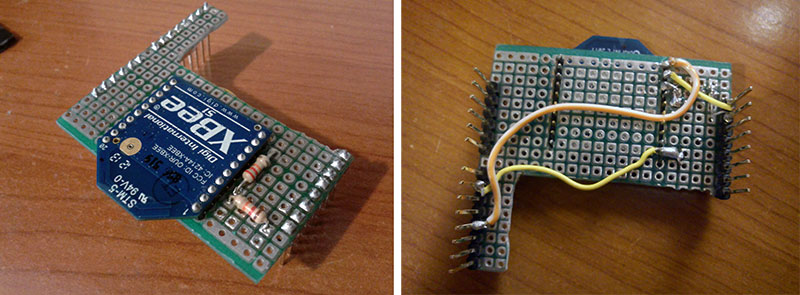
La seconda è un semplice circuito per l’utilizzo del modulo XBee: siccome il modulo funziona con tensioni pari a 3 V – 3,3 V è stato necessario creare un partitore di tensione per adattare i 5 V del pin Tx di Arduino. Comprende quindi l’alimentazione del modulo e il collegamento dei pin Tx e Rx.
Gabriele avrebbe potuto utilizzare un adattatore arduino xbee per la sua realizzazione ma ha preferito costruirselo come un vero maker sa fare.
E se è vero che non tutto è sempre semplice anche Gabriele ha riscontrato alcune difficoltà nella realizzazione che riporta perchè anche tu possa superarle seguendo i suoi passi:
Difficoltà riscontrate
Partendo dalla programmazione di Arduino UNO per il controllo dei servomotori, la prima difficoltà riscontrata è stata quella di poter utilizzare più di un servomotore: utilizzando 5 servomotori infatti Arduino richiede più energia, e con una semplice connessione USB a computer questi non riuscivano a funzionare correttamente. È stato quindi necessario utilizzare una fonte di energia differente, un alimentatore a 12V con una corrente di output massima di 1 A.
Il secondo problema riscontrato è stato quello del collegamento dei sensori di flessione: essendo dei resistori di resistenza variabile non funzionano come potenziometri, quindi se sottoposti ad una certa tensione avrebbero variato solamente la corrente circolante in essi; siccome gli ingressi analogici di Arduino acquisiscono dati in funzione della tensione in ingresso e non della corrente, è stato necessario creare un partitore di tensione mettendo in serie al sensore un resistore.
Per avere la massima sensibilità è necessario che il valore di resistenza del resistore fisso sia pari al valore medio compreso tra il minimo e il massimo di quelli assunti dal sensore: con alcune prove risulta che il sensore a riposo ha circa 60 KΩ di resistenza, e in massima flessione ha 30 KΩ; quindi ho scelto di utilizzare resistori da 47 KΩ, non essendo disponibile un valore commerciale da 45 Ω.

Un altro problema è stato quello dell’invio dei dati delle letture analogiche del guanto tramite il modulo wireless XBee: l’invio di 5 differenti valori creava problemi e questi non venivano distinti in maniera corretta da Arduino. Si è deciso quindi di utilizzare un carattere che specificasse l’inizio del pacchetto dati: la scheda Arduino presente sulla mano riceve i 5 valori analogici solamente dopo l’arrivo del carattere “<”, sapendo quindi che il dato successivo sarebbe stato assegnato al pollice, quello ancora successivo all’indice e così via.
Inoltre è stato necessario fare in modo che i valori da inviare fossero tutti compresi tra 0 e 255, perché i moduli XBee con la funzione Serial.write di Arduino sono in grado di inviare e ricevere solamente valori con estensione byte, ovvero 28=256 valori.
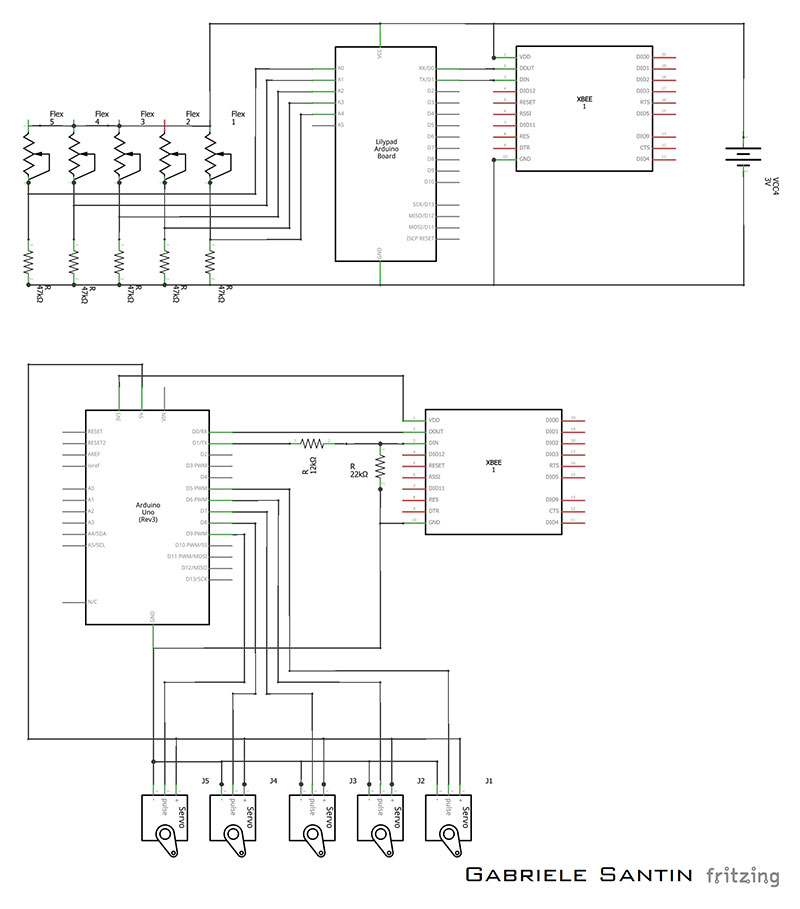
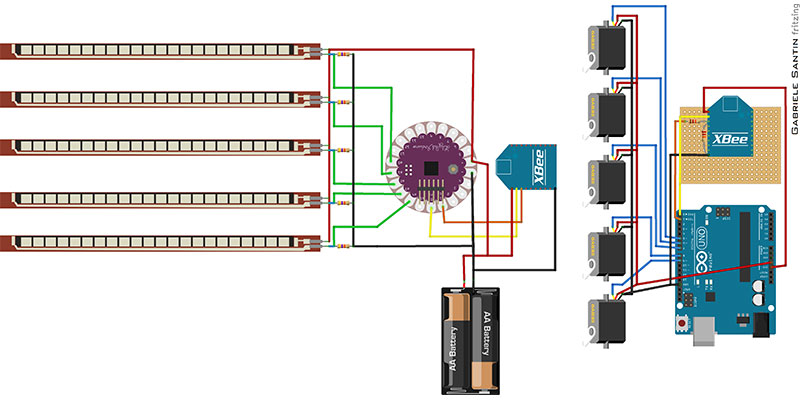
Schema dei collegamenti generale
Per riprodurre il progetto della robot hand xbee elettronica ti servono anche gli schemi dei collegamenti sia per l’arduino sia per i moduli xbee e la lilipad:
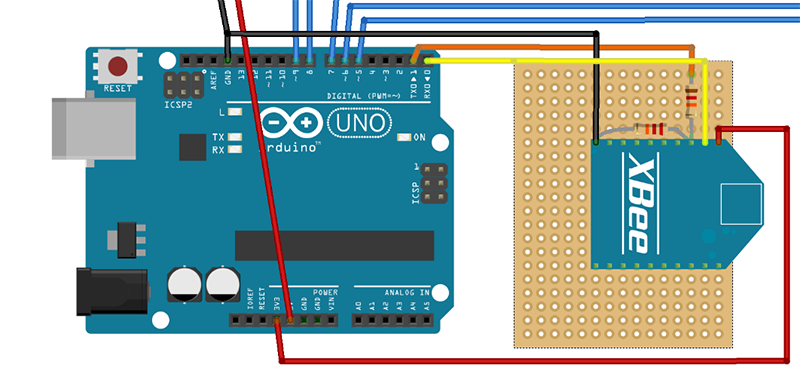
ma se non sai leggere uno schema elettrico puoi seguire lo schema grafico dei collegamenti:
Costruzione dell’elettronica
Gabriele mi ha inviato anche le foto del montaggio della mano con il particolare dell’adattatore per modulo XBee autocostruito:
il collegamento dei servo alla servo shield:
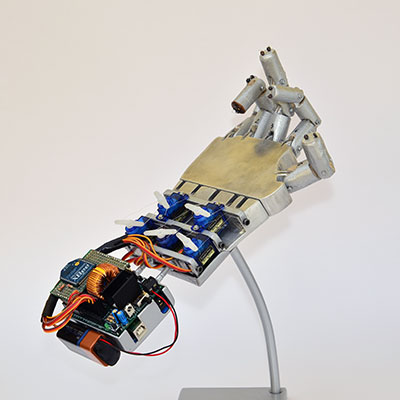
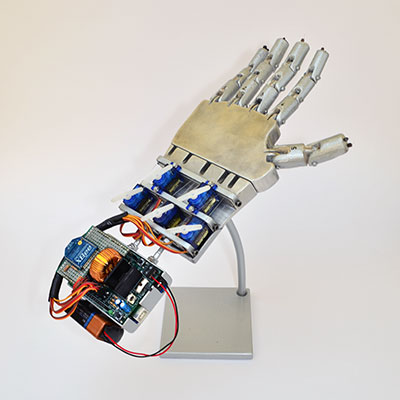
ed il montaggio completo con arduino ed i servo in posizione definitiva:
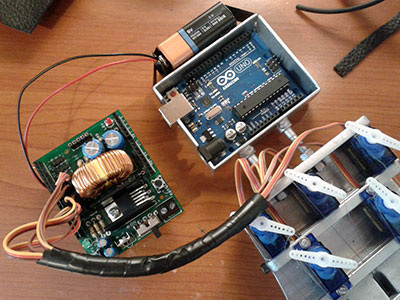
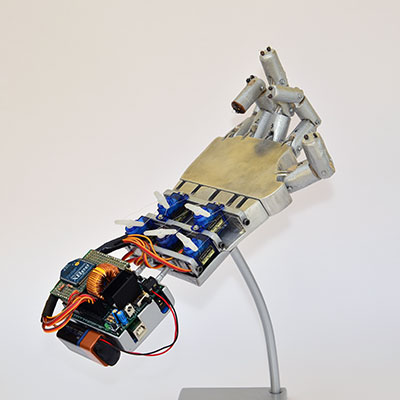
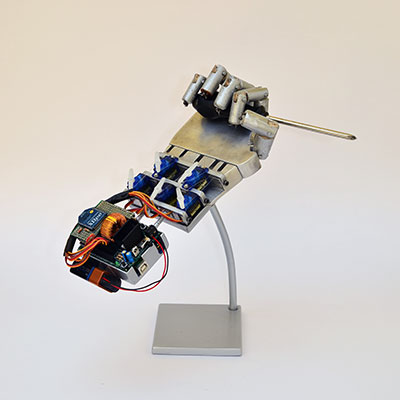
Nel prossimo articolo analizzerai lo sketch del trasmettitore e successivamente quello del ricevitore, ecco alcune foto del progetto finito:



 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
1 ping
[…] Robot hand XBee elettronica di Gabriele Santin […]