
E’ arrivata l’ora di aggiungere i motori: ZeroBot RPi gear motor. Monta i motori con moto riduzione ( gear ) al tuo ZeroBot RPi
Hai già letto nei precedenti articoli delle variazioni che ho eseguito al ZeroBot RPi, queste valgono anche per la parte motori.
I Gear motor
La descrizione di cosa sia un moto risuttore e come questo possa essere una buona soluzione per la propulsione del tuo ZeroBot RPi è descritta in tanti articoli sul web.
In questo articolo leggerai che tipo di motori puoi utilizzare nel tuo robot e come debbano essere modificati per essere utilizzati nel ZeroBot RPi gear motor.
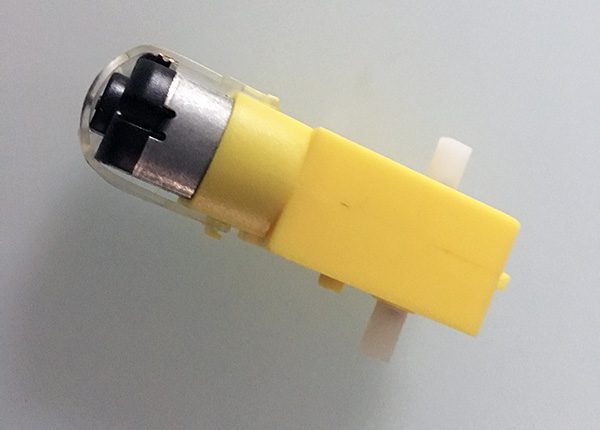
Il gear motor usato nel progetto originale è simile al modello che ho acquistato:
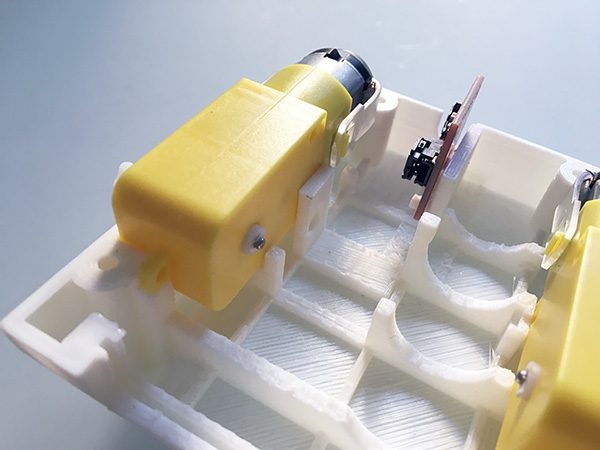
la modifica che ho apportato allo ZeroBot è stat di aggiungere un foro per ciascun motore in cui inserire una vite di fissaggio, esteticamente questa soluzione può risultare meno valida ma serve ad evitare l’uso della colla a caldo per fissare i motori ( come nel progetto originale), rendendoli facilmente sostituibili.
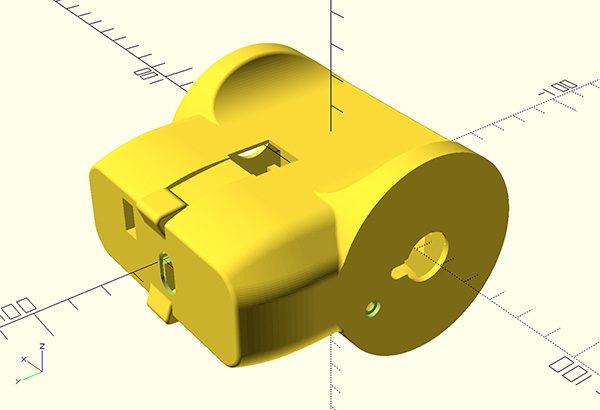
osservando il case noti che lateralmente è presente un foro con bordo ribassato per ospitare una vite M3 in modo che non intralci il funzionamento della ruota.
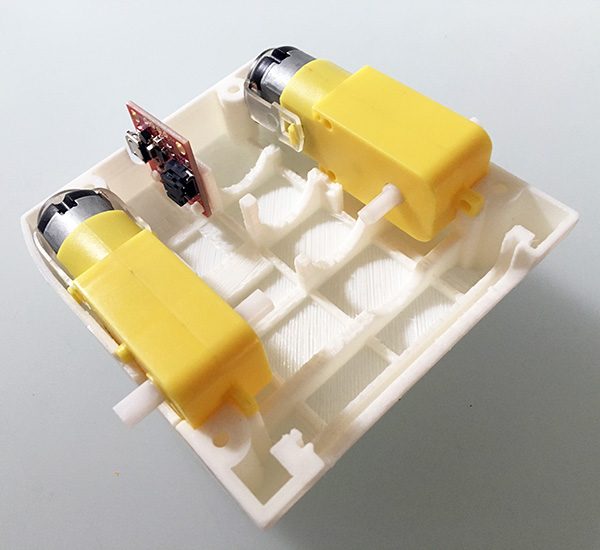
Il montaggio del ZeroBot RPi gear motor è facilitato dalle precise misure con cui è stato disegnato il case e dalla presenza della scanalatura in corrispondenza dell’albero motore:
Il fissaggio lo eseguirai incastrando i motori in posizione e facendo attenzione che entrambi i contatti di alimentazione siano rivolti verso l’interno:
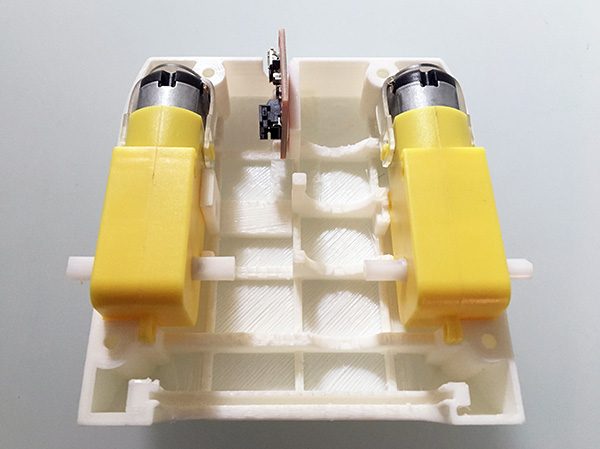
Se usi motori consigliati non avrai problemi con la posizione, si incastrano perfettamente.
Modifica ai ZeroBot RPi gear motor
Il tipo di motori in mio possesso hanno l’alberino in plastica sporgente da entrambi i lati per poter essere posizionato indifferentemente da un lato o dall’altro del robot.
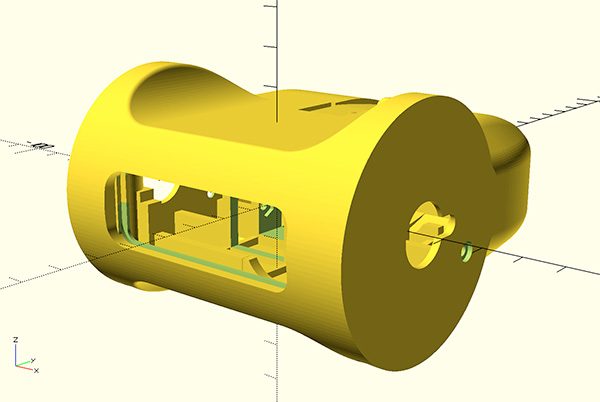
Tuttavia questa possibilità è allo stesso tempo un limite rappresentato dai ristretti ingombri del robot e lo spazio interno, per cui se lasciassi i due alberini interni interi otterresti un intralcio nel posizionare la LiPo 18650; è necessario reciderli:
lasciando che solo la parte esterna sporga dopo il montaggio e dopo aver chiuso il robot con la cover superiore:

Sei finalmente pronto per passare alla realizzazione del pannello frontale e procedere al completamento del robot.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 commenti
1 ping
Ciao Mauro,
Hai mica lo schema di collegamento elettrico che hai usato tu?
Hai poi terminato il progetto, non trovo nel tuo blog gli articoli relativi al SW.
Autore
Ciao Alessandro,
il progetto è ancora in progress, sto lavorando allo schema elettronico, il joystick ed il software.
Penso sarà necessario ancora qualche mese di lavoro. Se ti va di portare avanti una tua versione e pubblicarla io sono a disposizione per darti spazio, leggi nella sezione “collabora al blog” come fare per pubblicare un contributo.
[…] « ZeroBot RPi gear motor […]