
ZeroBot RPi Zero camera panel descrive il pannello frontale del robot a cui oltre alla camera RPi ho aggiunto la possibilità di inserire due sensori frontali per evitare gli ostacoli.
Il ZeroBot RPi Zero camera panel è diverso da quello originale per ospitare i due sensori IR della pololu che serviranno per evitare gli ostacoli.
Potresti sviluppare un sistema di guida assistita con il tuo robot in cui alcune operazioni, potenzialmente dannose per il ZeroBot RPi sarebbero automaticamente evitate.
I sensori IR del ZeroBot RPi
I sensori che ho deciso di utilizzare, vedi link sopra, sono Sharp GP2Y0D815Z0F, sufficientemente piccoli e precisi per essere alloggiati nel pannello frontale del robot.
Non ho trovato on-line un modello 3D dei sensori per cui me ne sono realizzato uno in modo empirico dopo averli acquistati:
ho usato il modello del GP2Y0D815Z0F per posizionarlo nel ZeroBot RPi Zero camera panel in posizione e disegnare il panello.
ZeroBot RPi Zero camera panel
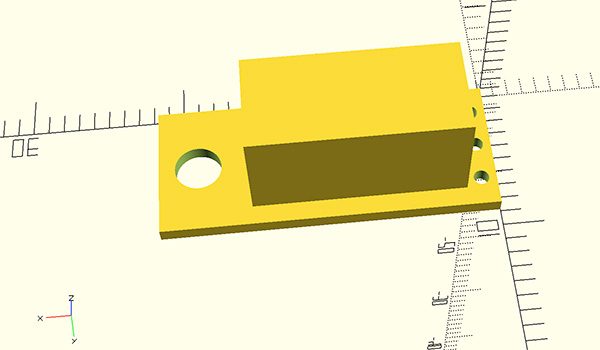
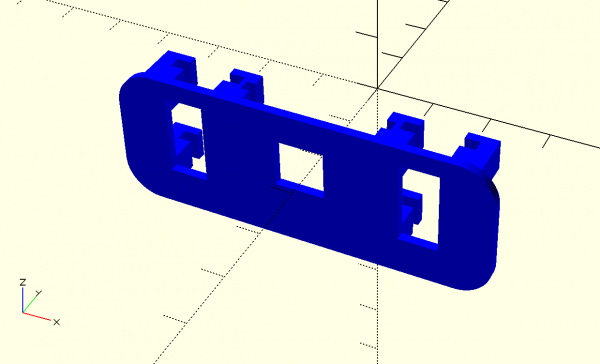
Il disegno del ZeroBot RPi Zero camera panel è fatto in openSCAD, come anche quello del sensore, con la sola differenza che sono partito dal modello STL del ZeroBot RPi originale per riprodurlo:
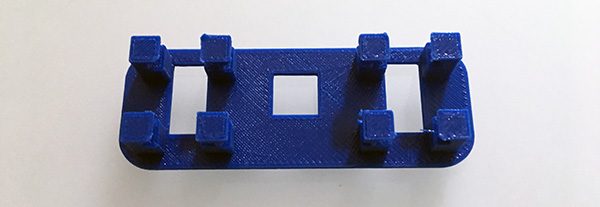
il risultato dopo la stampa è questo:
e la posizione dei sensori e della camera RPi dovrai farla seguendo questo semplice schema:
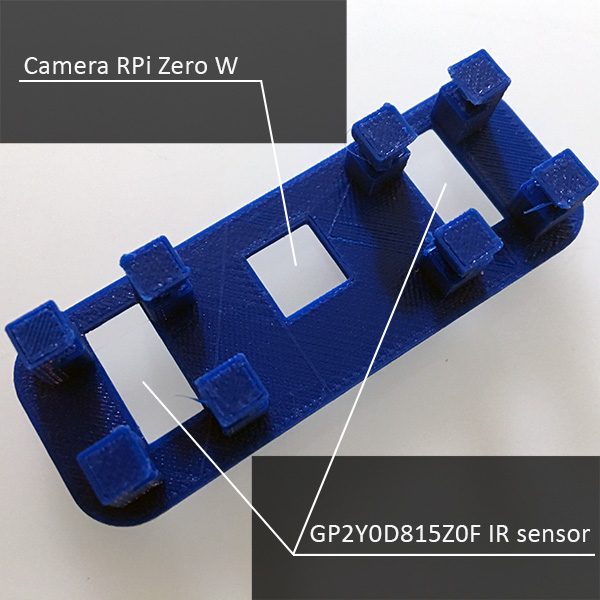 in cui i sensori trovano posto lateralmente e la camera al suo posto originale: il centro.
in cui i sensori trovano posto lateralmente e la camera al suo posto originale: il centro.
Ora puoi assemblare il camera panel sul ZeroBot RPi e chiudere il tuo robot ZeroBot RPi per osservare che effetto faccia nel suo insieme:

Ti mancano le ruote per vederlo tutto assemblato .. montale come mostrato in figura, una per lato:

la parte meccanica è conclusa .. ci dedicheremo presto alla parte elettronica ed alla programmazione della RPi per ricevere ordini via WiFi da un telecomando o dallo smartphone trasmettendo un feedback visivo al pilota.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza