
ZeroBot RPi Zero W model è la mi a versione del più noto ZeroBot – Raspberry Pi Zero FPV Robot che probabilmente hai visto su internet

Qualche mese fa è stato postato sui canali social di Hackaday.io il progetto ZeroBot realizzato con una RPi Zero, da cui la prima parte del nome, ed un robot completamente stampato in 3D.
Il progetto mi ha incuriosito subito ed ho iniziato a documentarmi leggendo tutti gli articli che ho trovato sul sito hackaday e link collegati in cui la documentazione descrive davvero bene il progetto e le parti hardware e software che ti servono.
Tutti i file stl puoi scaricarli da thingiverse:
Il mio ZeroBot RPi Zero W model
Come sai, se leggi questo blog abitualmente, non sono contento quando non personalizzo i progetti che trovo aggiungendo a ciascuno il mio contributo.
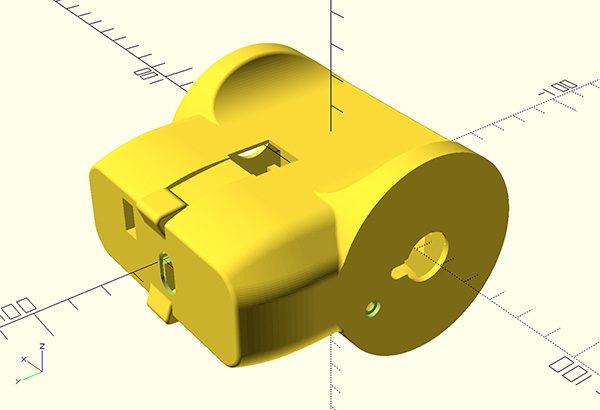
Ho quindi scaricato da Thingiverse i file pubblicati dall’autore del progetto ed iniziato a rielaborarli in openscad:
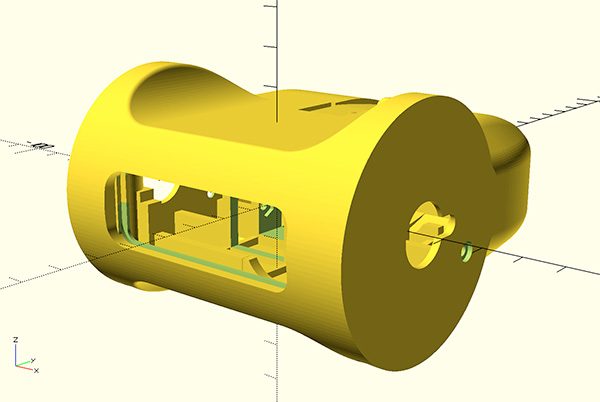
dapprima realizzando il modello montato, unendo i due stl relativi alla scocca superiore ed inferiore.
Successivamente ho deciso di dotare il robot di alcune componenti come il powercell della sparkfun ed usare come driver per i motori il DRV8835 più piccolo rispetto a quello utilizzato nel progetto originale.
Iniziamo dall’alimentazione del ZeroBot RPi Zero W model per alimentarsi usa una batteria LiPo 18650 da 3,7v e, come sai la RPi Zero W necessita di 5v di alimentazione, per cui ho deciso di utilizzare il PowerCell per avere allo stesso tempo uno step-up da 3,7 a 5v ed un sistema per caricare il mio robot in modo semplice.
Nella scheda prodotto puoi trovare il file STL del modulo, comodissimo per realizzare l’alloggio:
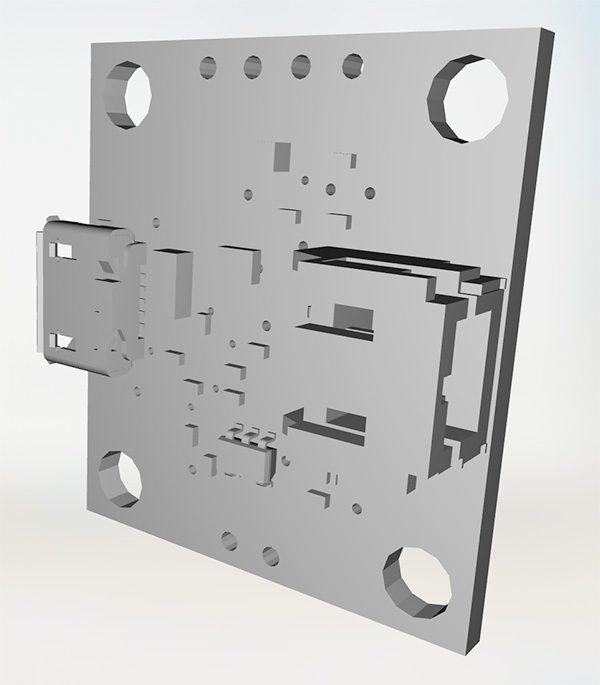
dopo averlo scaricato ho inserito il componente con openScad nel case del robot e disegnato il supporto per il montaggio:
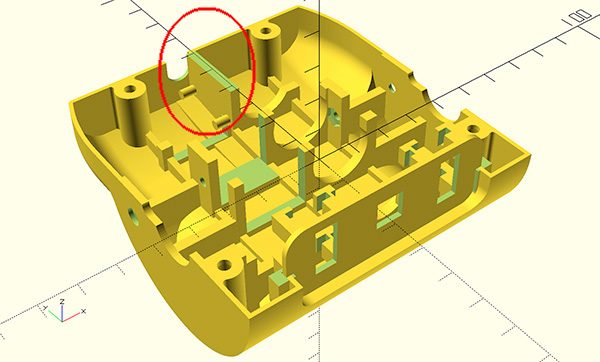
oltre a praticare un foro, virtuale, nella parte posteriore del robot per consentire il facile posionamento di un cavetto di carica:
una caratteristica interessante del powercell è la possibilità di commutare la modalità di carica:

fonte: wiki sparkfun
e la modalità di erogazione dell’alimentazione step-up ( voltaggio 5v ):

fonte: wiki sparkfun
semplicemente portando il pin EN a massa, per cui, come suggerito dal produttore, ho predisposto un microswitch:

fonte: wiki sparkfun
che avrà funzione di interruttore per il robot.
Noti l’alloggio per il microswitch come foro quadrato presente alla del robot nella parte posteriore:
La stampa 3d del case ZeroBot RPi Zero W model
è giunto il momento di stampare … dopo qualche ora di stampa, ho impostato la stampante su valori di velocità bassi per avere miglio attenzione al dettaglio, otterrai un oggetto simile:
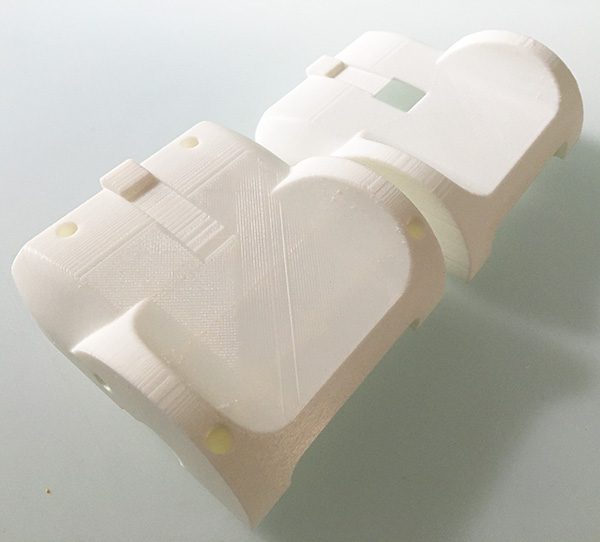
pronto per essere assemblato.
Prova subito il powercell nell’alloggio presente nel parte inferiore del ZeroBot RPi Zero W model:
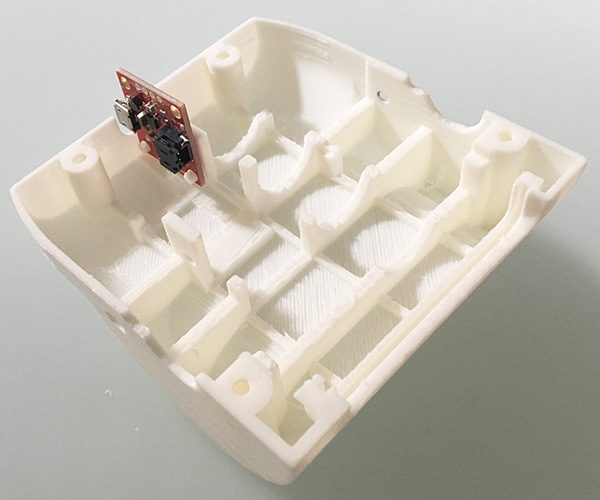
perfetto i fori sono adatti a bloccare il componente e mantenerlo sufficientemente fermo senza impedirti di sostituirlo o spostarlo:
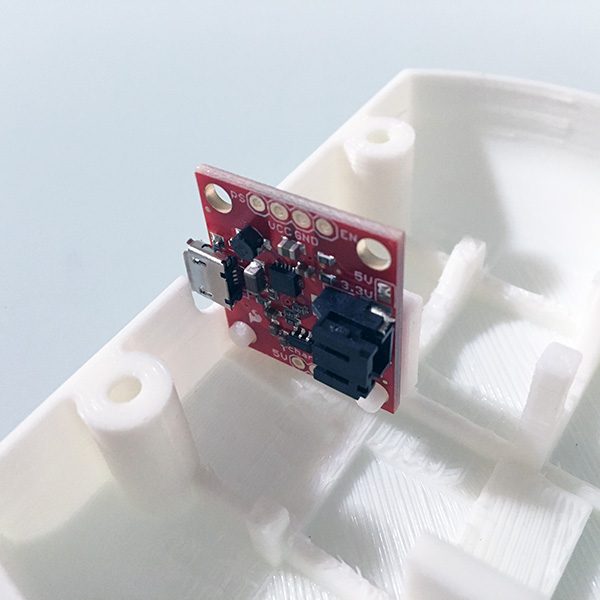
Chiudi il ZeroBot RPi Zero W model e osserva come il connettore sia ben visibile e facilmente accessibile:
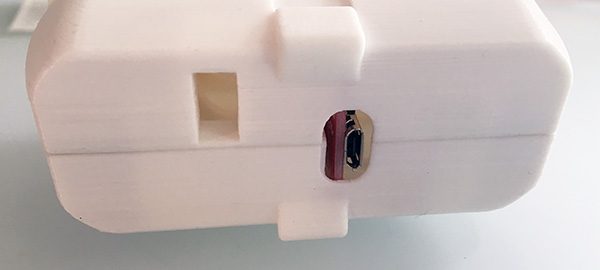
direi che il primo passo è fatto.
Puoi scaricare i file del progetto modificato da me su thingiverse.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
2 commenti
2 ping
Ciao. In Thingiverse non vedo l’opzione per scaricare il tuo modello
Autore
Ciao Jose,
non mi ero accorto del problema, grazie per la segnalazione, controllerò e risolverò nei prossimi giorni.
[…] « ZeroBot RPi Zero W model […]
[…] di guida assistita con il tuo robot in cui alcune operazioni, potenzialmente dannose per il ZeroBot RPi sarebbero automaticamente […]