
Microbot irrigatore 3D è un progetto didattico che ho realizzato per mio figlio qualche anno fa e che mi è capitato tra le mani qualche giorno fa.
Oramai il coding si insegna dalle elementari, spesso sottoforma di programmi come skratch per realizzare piccoli algoritmi che prendono vita sul computer.
Esistono alcune estensioni di scratch integrate con l’IDE arduino che possono essere utili per passare dalla teoria alla pratica, ad esempio con un robot.
Circa due anni fa ho deciso di utilizzare la microbit per realizzare un robot che potesse essere facile da programmare.
L’ambiente di sviluppo della microbit è studiato per essere del tutto simile a skratch ed essere immediatamente utilizzato sulle schede omonime:

Fonte sito ufficiale Microbit.org
grazie al suo semplice sistema di programmazione makecode.microbit.org è facile programmare un robot dai 8 anni in su.
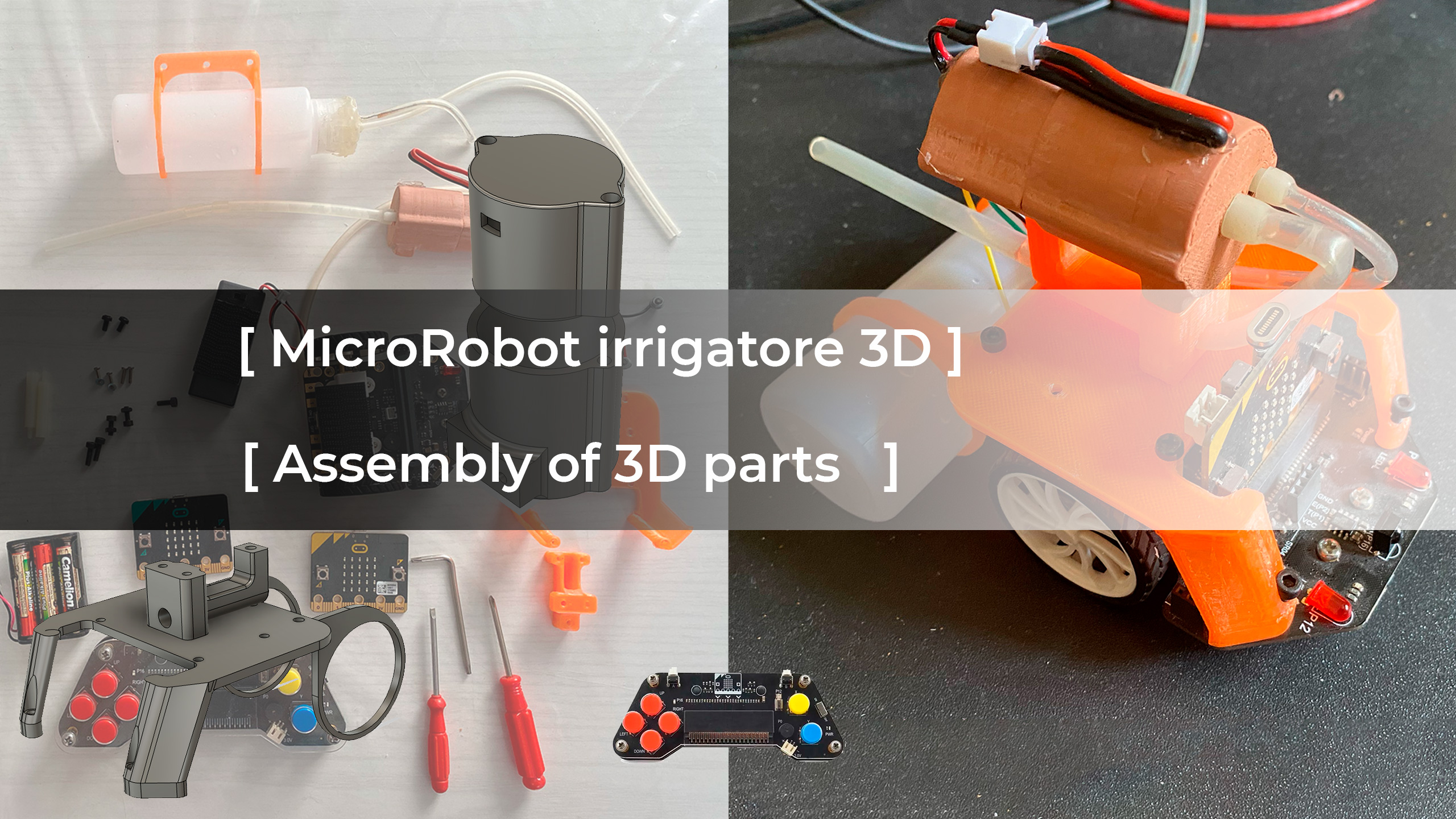
Prima di dedicarci al codice ti presento, in questo articolo, il microbot irrigatore 3D
Microbot irrigatore 3D
come hai letto è nato come applicazione robotica didattica per mio figlio che un giorno mi ha chiesto se fosse stato possibile aiutare il nonno ad irrigare le piante del giardino.
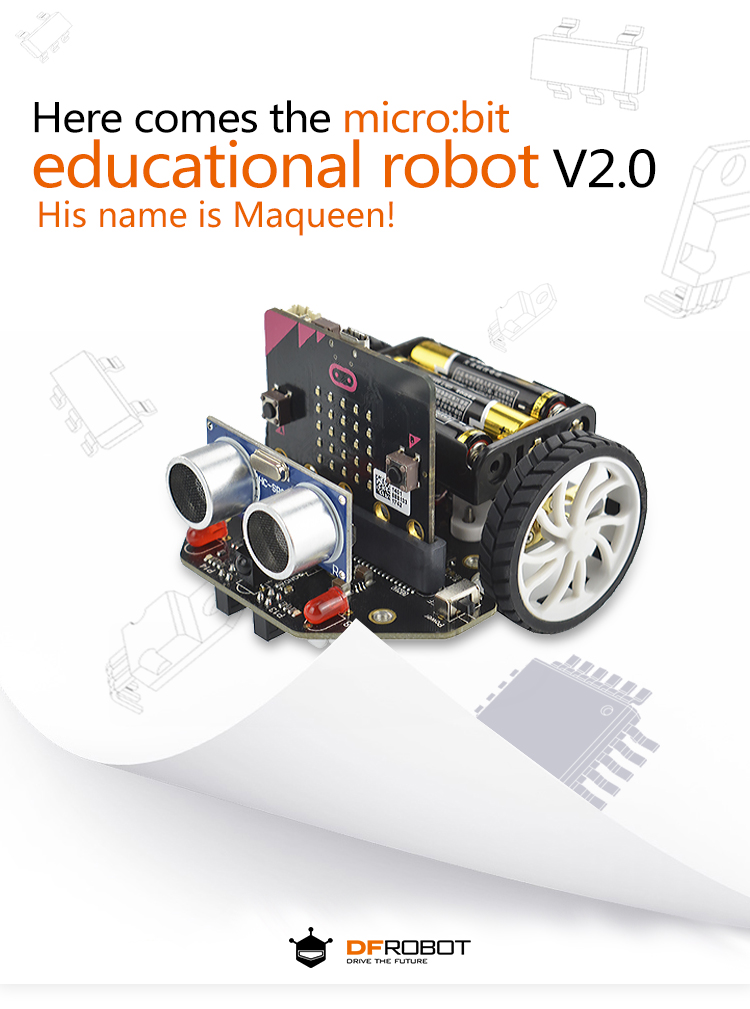
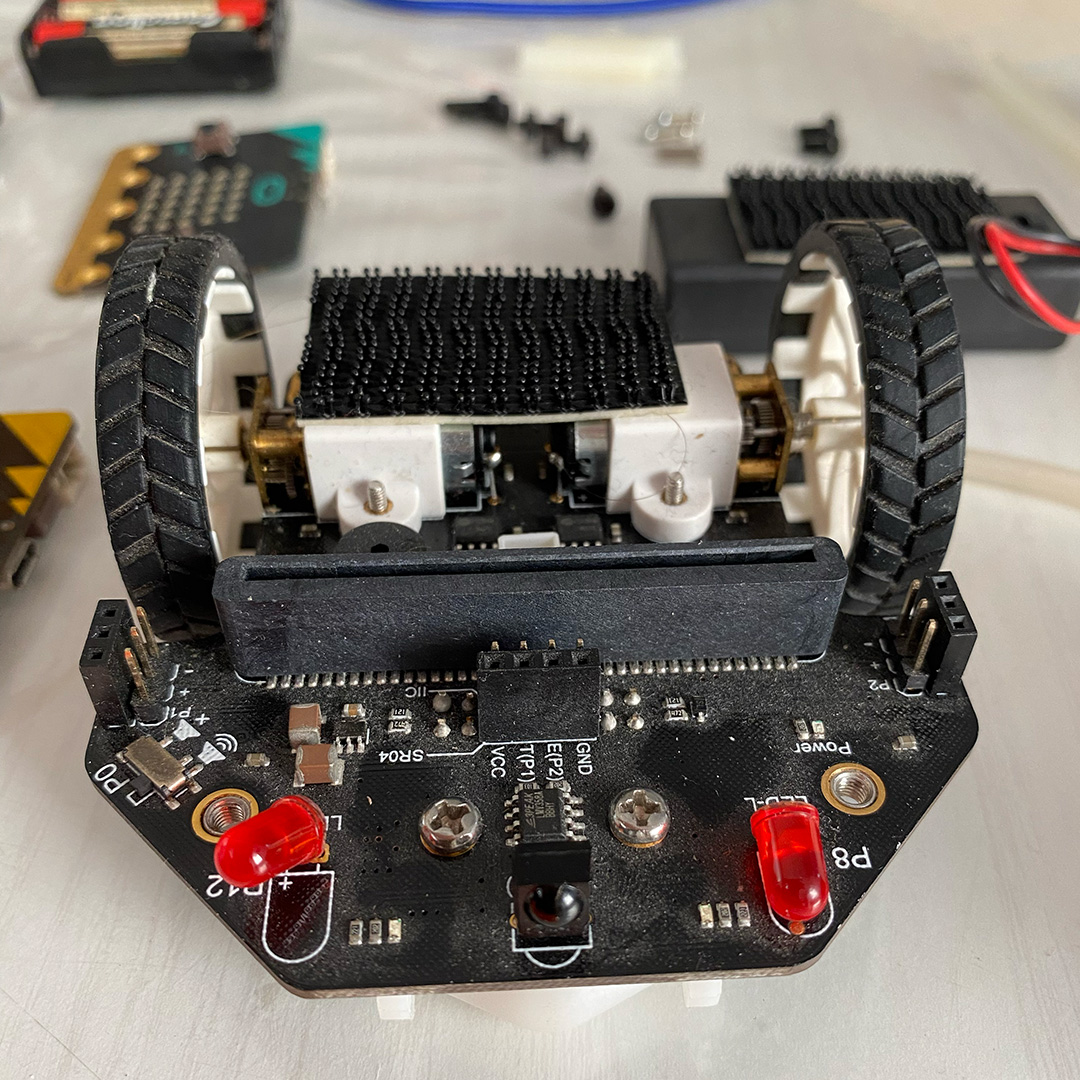
Abbiamo deciso di prendere una delle piattaforme robot disponibili per microbit: il maqueen della DFRobot
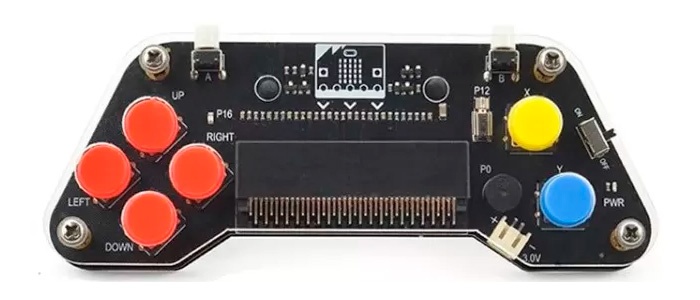
con il suo controller: gamepad
ed utilizzando Fusion 360 puoi realizzare un case/supporto per la pompa e per il serbatoio.
Andiamo in ordine
Iniziando da una pompa simile alla seguente:

puoi disegnare un case come il seguente:
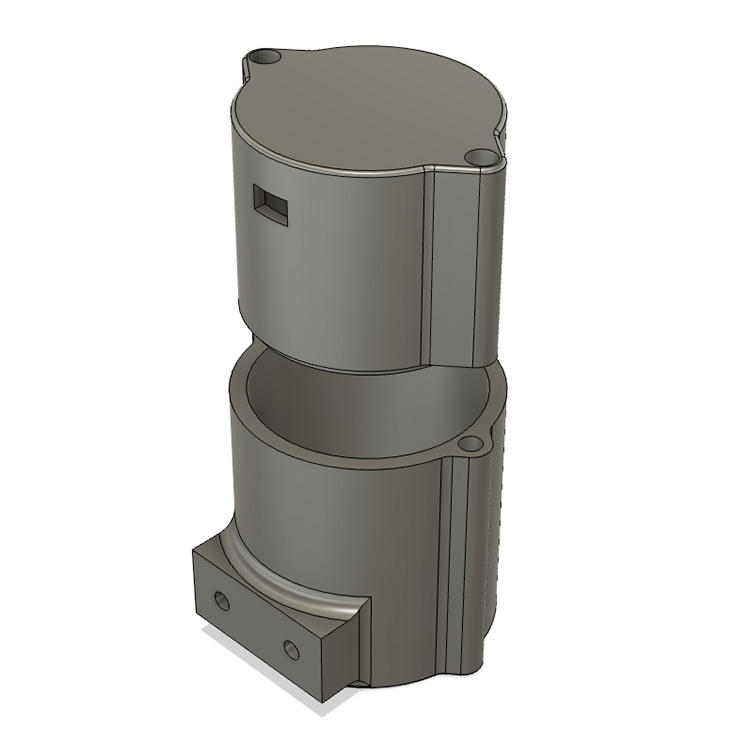
che sfruttai due fori in basso per essere fissato al resto del progetto.
Lo chassie del Microbot irrigatore 3D
La progettazione dello chassie è stata un po’ complessa dovendo ricavare tutte le dimensioni e distanze dei fori con il calibro e riportarle in fusion 360:
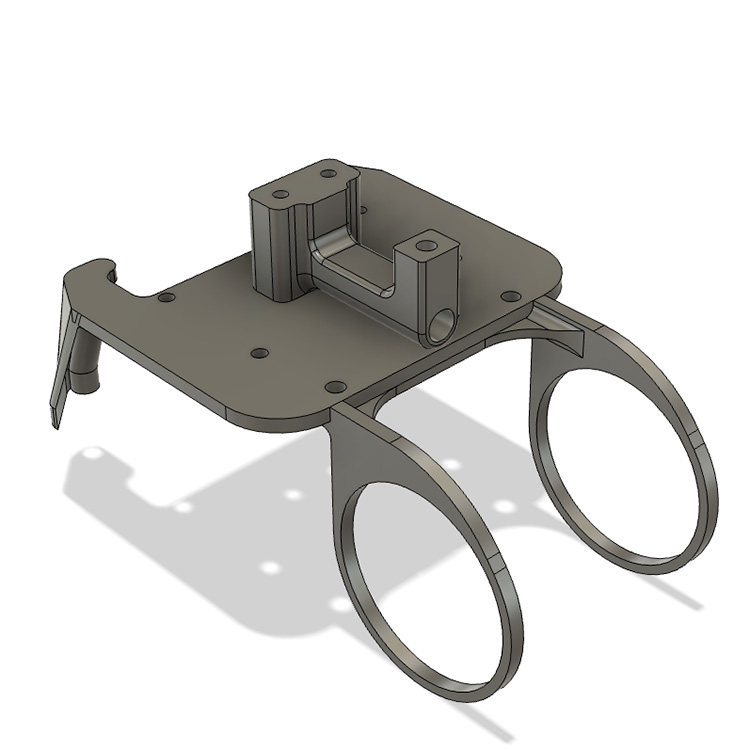
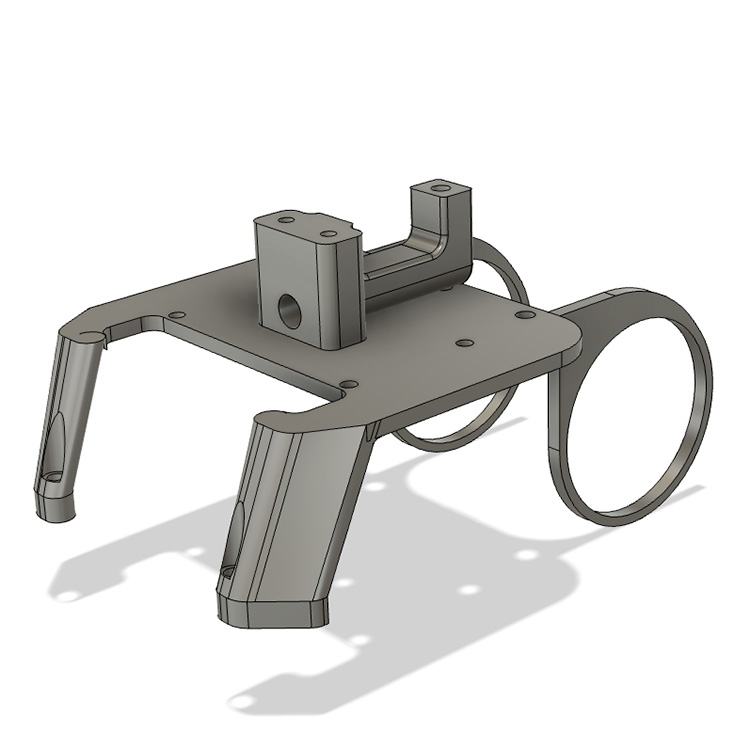

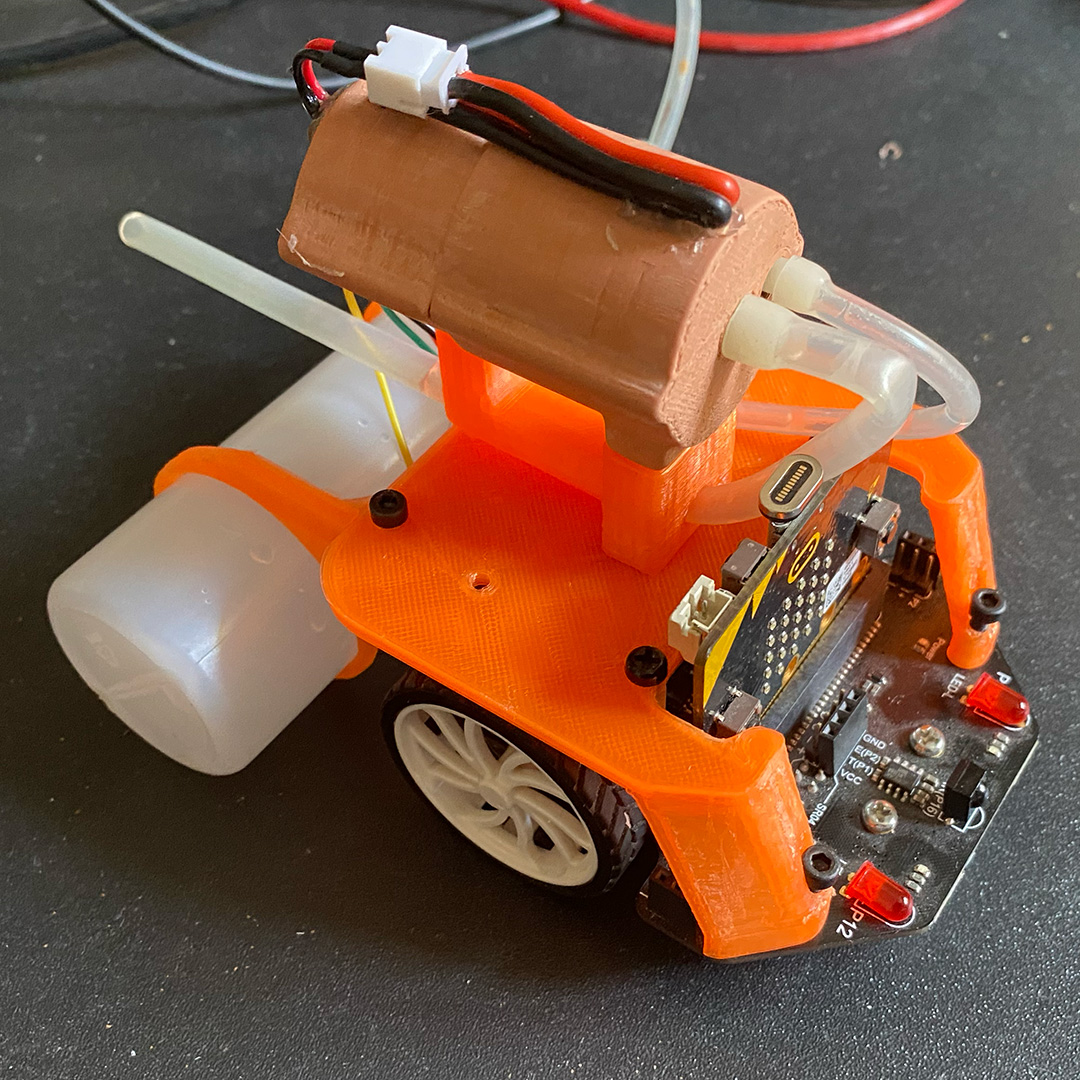
tuttavia il risultato è stato davvero soddisfacente:
Dopo aver stampato tutte le parti in 3D:

e preparato tutti i componenti elettronici e meccanici puoi dedicarti al montaggio.
Ti serviranno alcune viti di diverse lunghezze ed i corrispondenti dadi:

il dettaglio puoi trovarlo nella lista dei materiali sotto.
Assembla il robot
Parti dal supporto per il serbatoio che fisserai allo chassie con le due viti in plastica e relativi dadi:

il foro centrale è di sicurezza, ossia puoi usare una ulteriore vite e dado per fissare meglio le due parti tra loro.
Il passaggio successivo è montare il supporto per la pompa sullo chassie:

utilizzando due delle viti M2 con rondella;
userai le altre due viti per fissare la pompa al suo supporto:
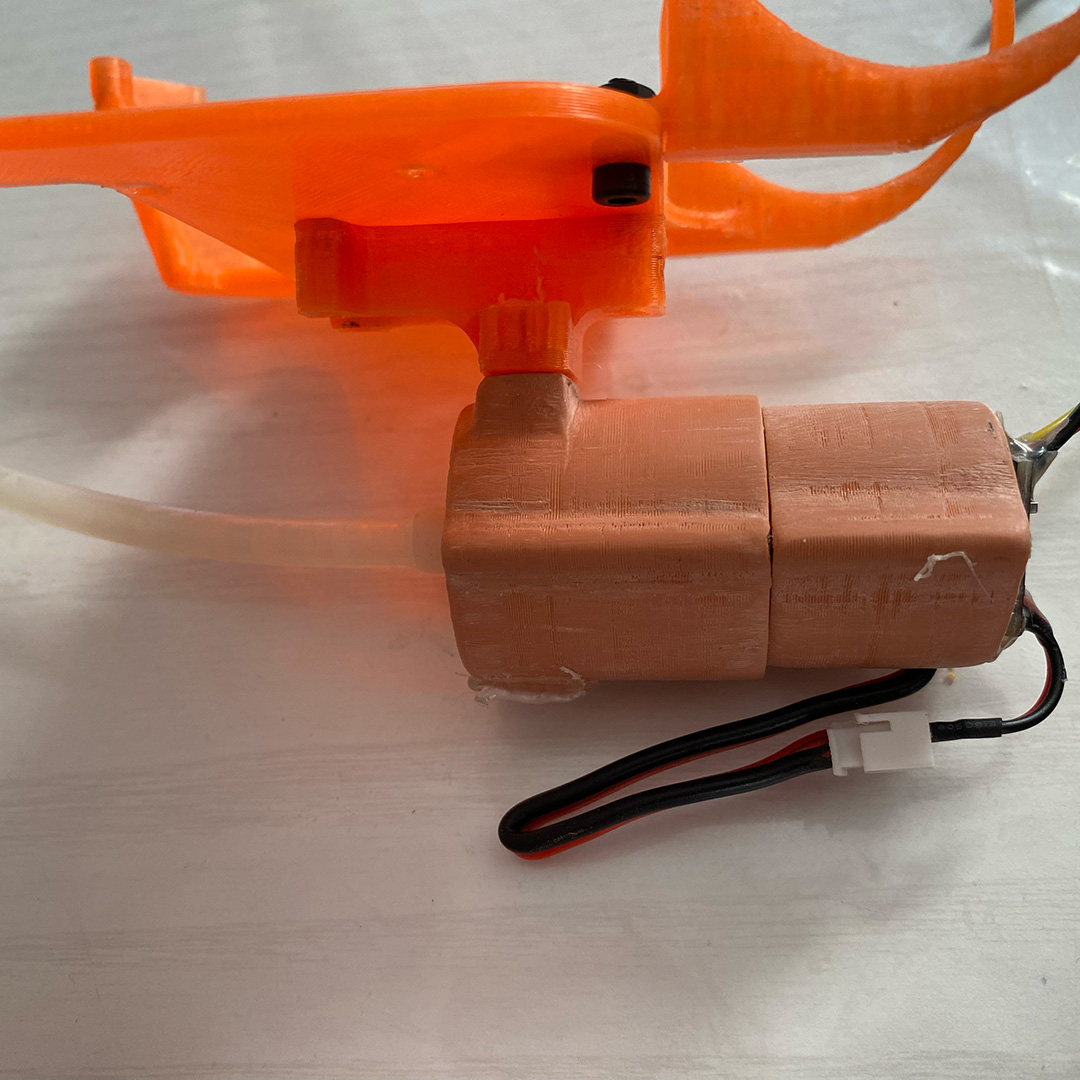
Avrai notato che sul retro della pompa è presente una scheda elettronica, si tratta del driver per motori DRV8833 di cui leggerai in un prossimo articolo dedicato al microbot irrigatore 3D.
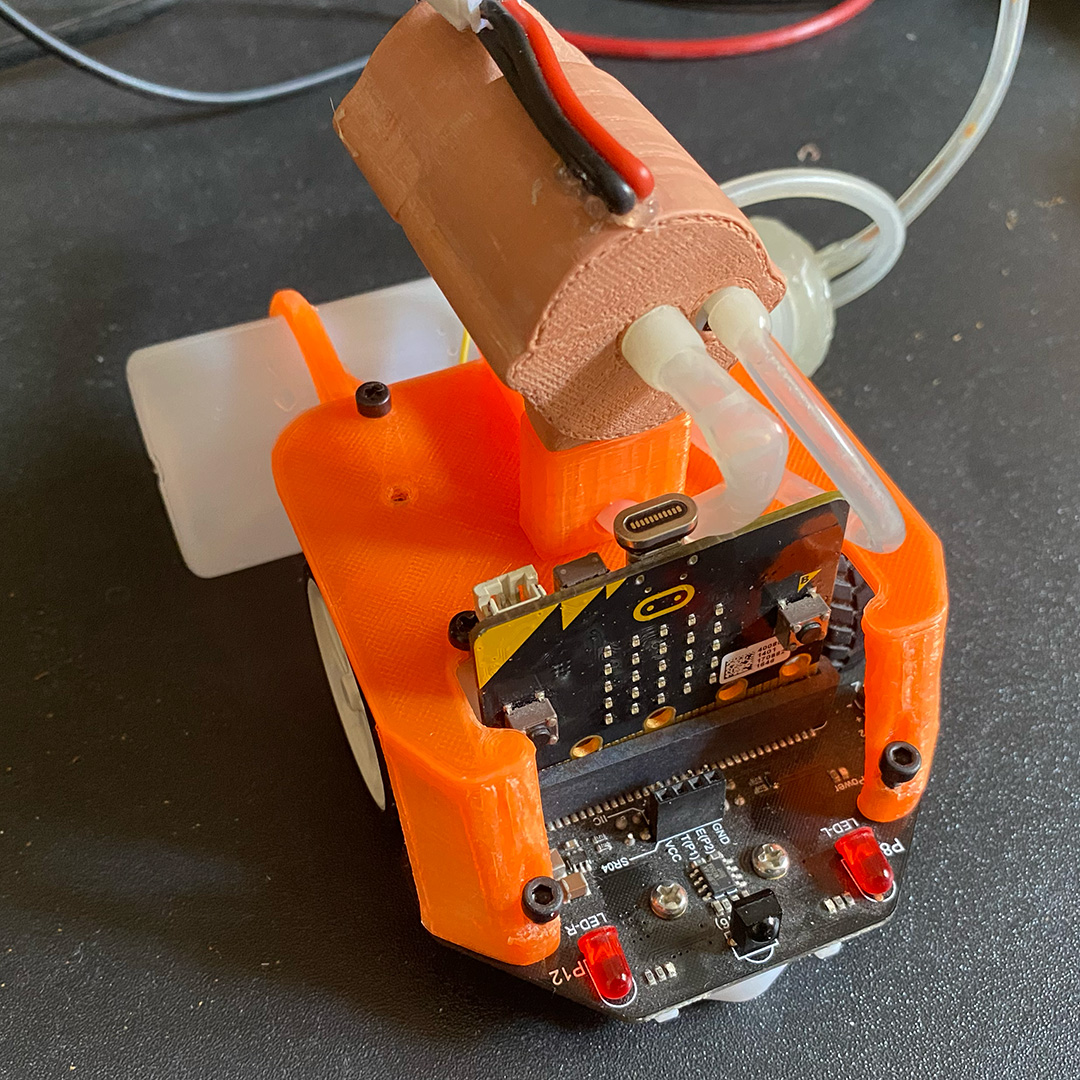
Per ultimare il montaggio non resta che avvitare lo chassie stampato in 3D alla base del microbot:
usando le due viti M3x10 mm in plastica e i due distanziali:
Notice
Se i distanziali li trovassi neri potresti ottenere un effetto migliore, io li avevo solo bianchi.
Materiale necessario:
- n.1 pompa per aria ( https://amzn.to/3AwWusf )
- n.1 mini motor driver drv8833 ( https://amzn.to/3YRTyjn )
- n.1 dfrobot maqueen microbit robot platform ( https://www.robotics-3d.com/microbit/7169-micro-maqueen-microbit-robot-platform.html )
- n.1 micro Game pad ( https://www.robotics-3d.com/microbit/6963-microgamepad.html )
- n.2 microbit ( https://amzn.to/4ft9OfW )
- n.1 contenitore per liquidi 100 ml ( https://amzn.to/3Ai0Rrf )
- n.1 tubo in silicone diametro esterno 6 mm
- n.3 viti M3x16 mm testa a brugola;
- n.4 viti M3x10 mm in plastica;
- n. 2 dadi in platica M3;
- n.4 viti M2x10 mm
- n.2 rondelle per M2;
- n.2 distanziali in plastica M3x30 mm;
File STL del progetto
Puoi scaricare tutte le parti disegnate in 3D da questo sito, ti consiglio di stampare con del PLA semitrasparente, io ho utilizzato l’arancione in contrasto al nero del microrobot, ed una precisione 0.15 per layer.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza