
E’ giunta l’ora di iniziare ad assemblare la prima parte: Robot arm controller
Come hai letto nei due articoli precedenti ( Robot arm 3D printed e Robot arm 3D printed openscad ) quest’ultima è stata modificata per adattarla ai componenti che già avevo in lavoratorio.
Premessa all’assemblaggio del Robot arm controller
Prima di iniziale ad assemblare le parti del controller è necessario stamparle, non dimenticare che il controller, come il robot arm, è stampato in 3D:
 Le parti necessarie alla realizzazione del controller sono:
Le parti necessarie alla realizzazione del controller sono:
- base
- la spalla
- il braccio
- il polso
la chiusura della pinza avverrà mediante la rotazione di uno dei potenziometri posto sulla base del controller,.
L’altro potenziometro lo userai per la rotazione del robot in quanto il controller non possiede tale movimento alla sua base.
Potrebbe essere una delle future implementazioni che potresti fare del progetto.
Le parti 3D del Robot arm controller
L’elenco delle parti elencato nel paragrafo precedente non è completo in quanto mancano le parti accessorie necessarie al funzionamento dei potenziometri: le leve.
Queste ultime sono state stampate in 3D e arricchite di un asse esagonale che coincide con il foro, anch’esso esagonale, del potenziometro.
In ordine, iniziamo:
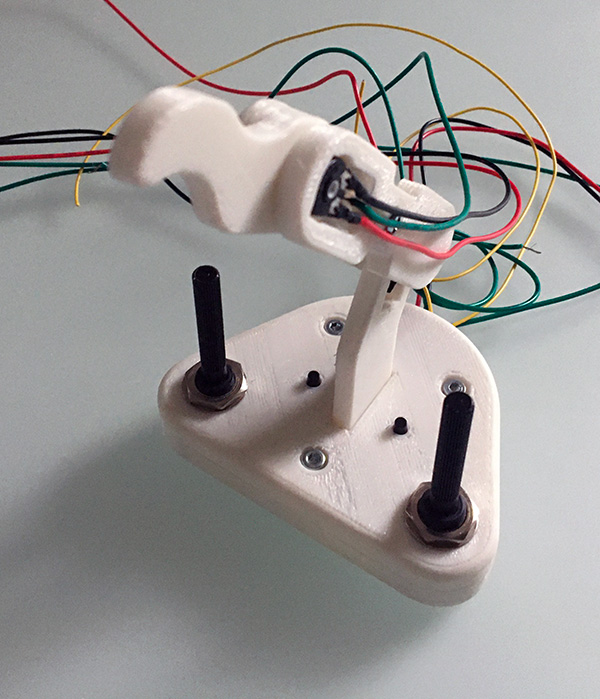
La base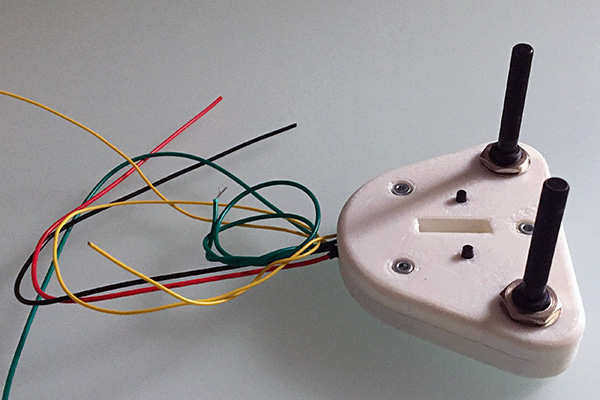
di cui hai già letto un articolo dedicato alla Sua personalizzazione e che nella figura sopra risulta già assemblata con i potenziometri ed i pulsanti di controllo.
Per realizzarla ti servono:
- due parti stampate in 3D: la base vera e propria e la cover sovrastante;
- due potenziometri da 10Kohm o superiori con manopola;
- due bottoni, o switch, on/off normalmnete aperti;
- die resistenze da 10Kohm o superiori come pull-up;
Nel prossimo paragrafo ti mostro il suo montaggio.
Per montare il braccio hai bisogno delle parti stampate in 3D:
La spalla
La spalla è il primo componente da montare sulla base:
la spalla ( shoulder ) a cui ho collegato un potenziometro circolare di sezione 10mm circa in questa posizione:
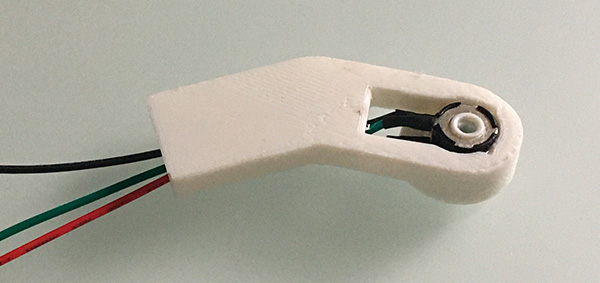
che servirà a far muovere la giuntura corrispondente del robot;
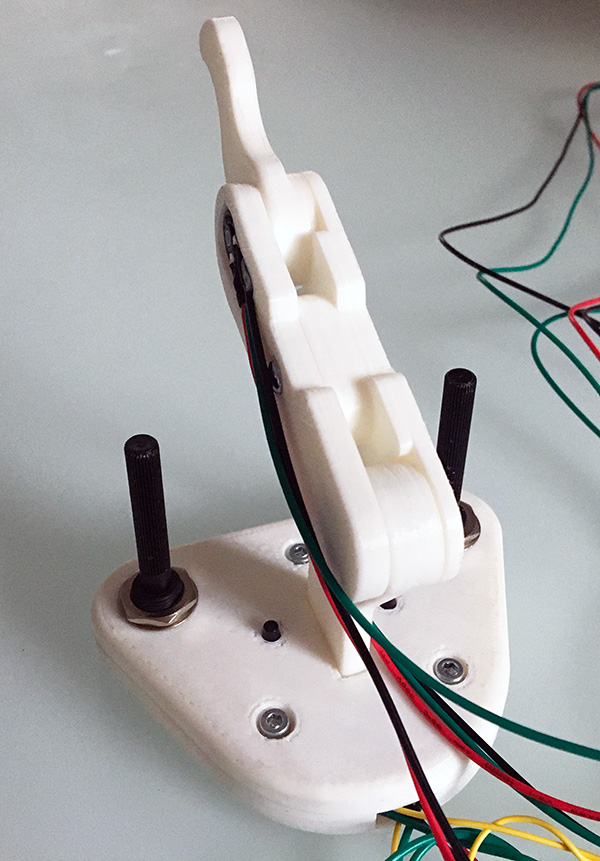
Il braccio
Il braccio del robot arm controller è la parte più lunga da stampare:
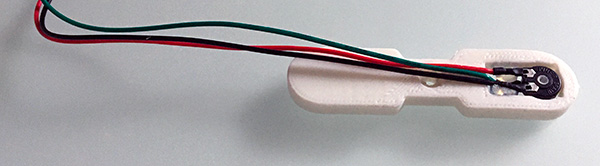
ed è composta in due parti, quella mostrata sopra, a cui va collegato il potenziometro che muoverà il polso, e questa che blocca spalla e polso:
mediante una vite M3 x 20mm ed il corrispondente dado.
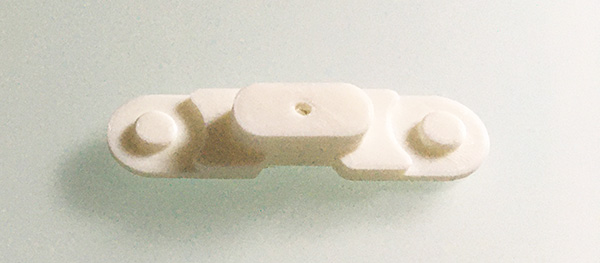
Il polso
è la parte che afferri con le mani, le tue mani, per controllare il robot:

e rappresenta l’estremità più alta del controller.
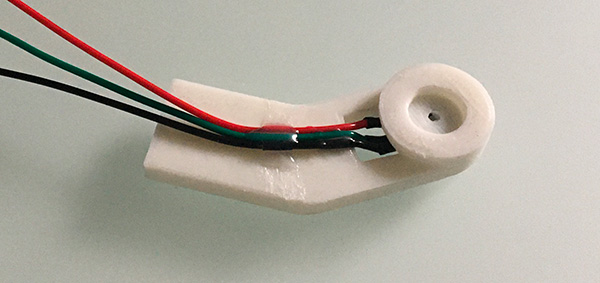
Le leve dei potenziometri
questi elementi, invisibili dopo il montaggio, rappresentano la componente che permette ai potenziometri di rilevare il movimento e trasferirlo al micro controllore, arduino, per governare il robot:

e deve essere incollato nelle sedi apposite del braccio e del polso al fine di poter interagire con i rispettivi potenziometri.
Il montaggio del robot arm controller
La fase di montaggio del robot arm controller non è complessa, richiede solo un po’ di manualità per le saldature e la predisposizione dei componenti.
Ho realizzato un video per mostrarti i dettagli del processo di montaggio:
in cui vedi tutte le fasi, sia di preparazione dei componenti da inserire nella base, sia di assemblaggio e sistemazione dei cavi.
Il passaggio successivo è il montaggio delle altre parti del braccio robot che ho riportato in quest’altro video:
al termine del quale il robot arm controller risulta montato e simile all’immagine seguente:
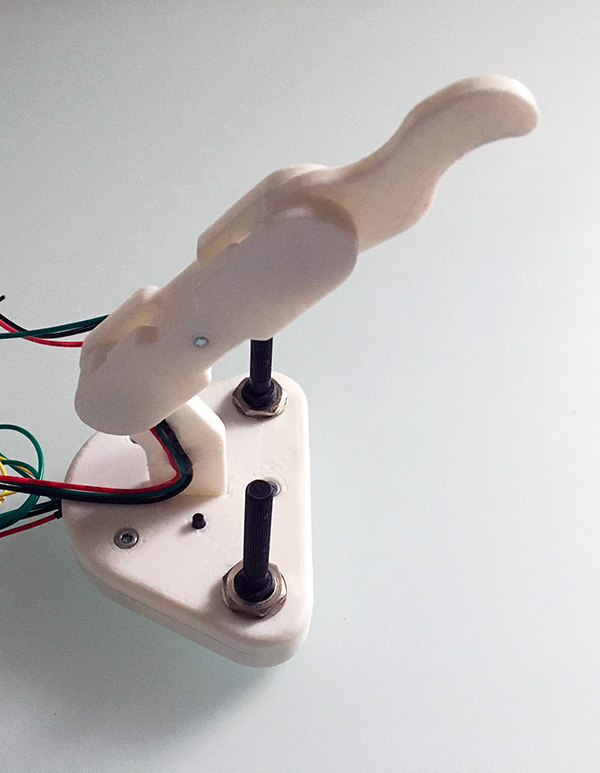
Le informazioni ed i video sul montaggio dovrebbero averti fatto intuire chiaramente tutti i passaggi necessari per la realizzazione di questa prima parte.
Un consiglio: prima di montare le leve dei potenziometri è bene che tu imposti a circa metà la corsa di ciascun potenziometro del braccio in modo da avere sufficiente corsa in fase di taratura e controllo.
Ricorda che puoi scaricare l’intero progetto: robot arm + controller modificato dal sito thingiverse.

 Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza
Il blog mauroalfieri.it ed i suoi contenuti sono distribuiti con Licenza